13.18 Run Tab
13.18 Run Tab
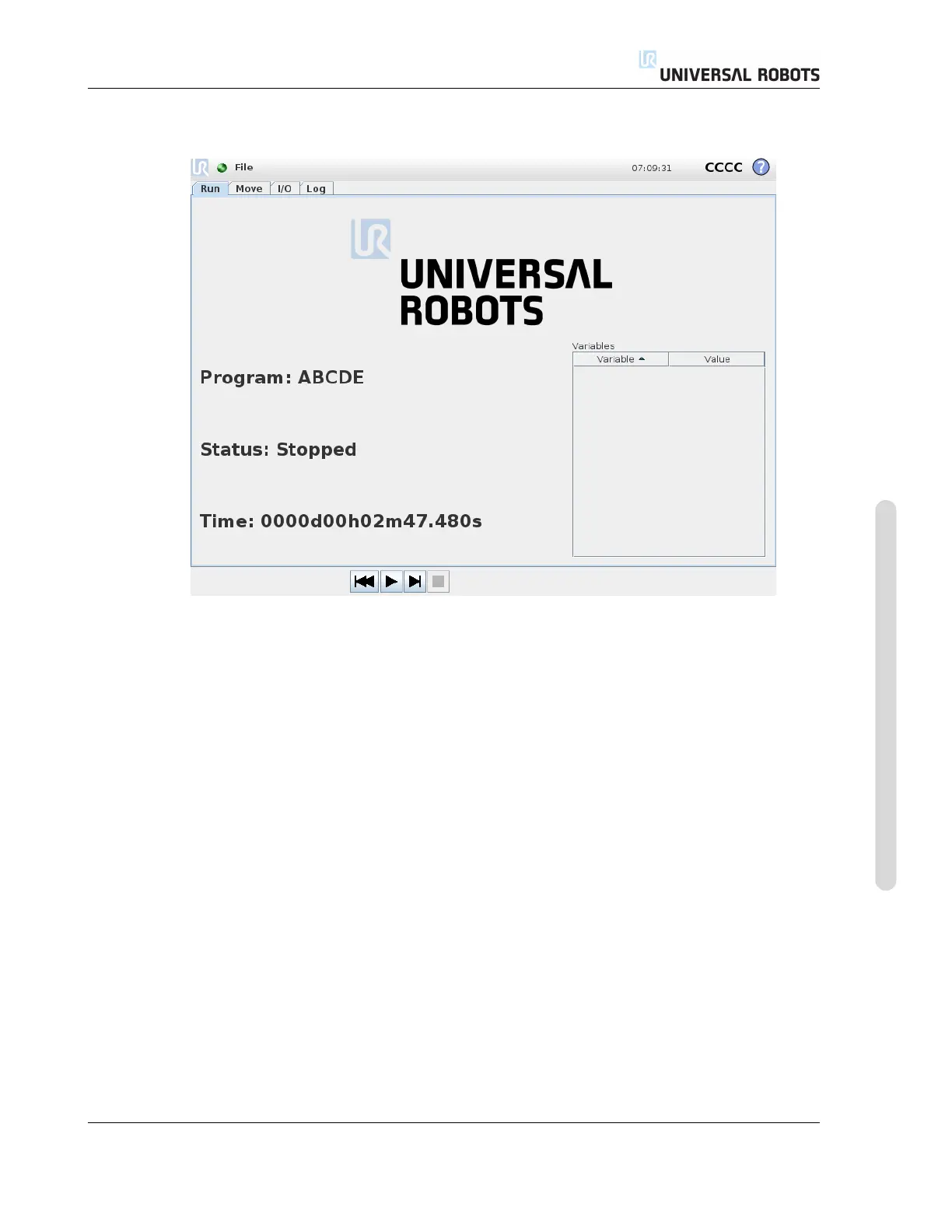
This tab provides a very simple way of operating the robot arm and control box, with as few buttons
and options as possible. This can be usefully combined with password protecting the programming
part of PolyScope (see 15.3), to make the robot into a tool that can run exclusively pre-written
programs.
Furthermore, in this tab a default program can be automatically loaded and started based on an
external input signal edge transition (see 13.15). The combination of auto loading and starting
of a default program and auto initialization on power up can, for instance, be used to integrate the
robot arm into other machinery.
Version 3.10
Copyright © 2009–2019 by Universal Robots A/S. All rights reserved.
II-67 CB3

 Loading...
Loading...






