5.3 Controller I/O
The Robot Emergency Stop input cannot be used for sharing purposes, since both machines will
wait for the each other to go out of the emergency stopped condition.
In order to share the emergency stop function with other machinery, the following configurable
I/O functions must be configured through the GUI.
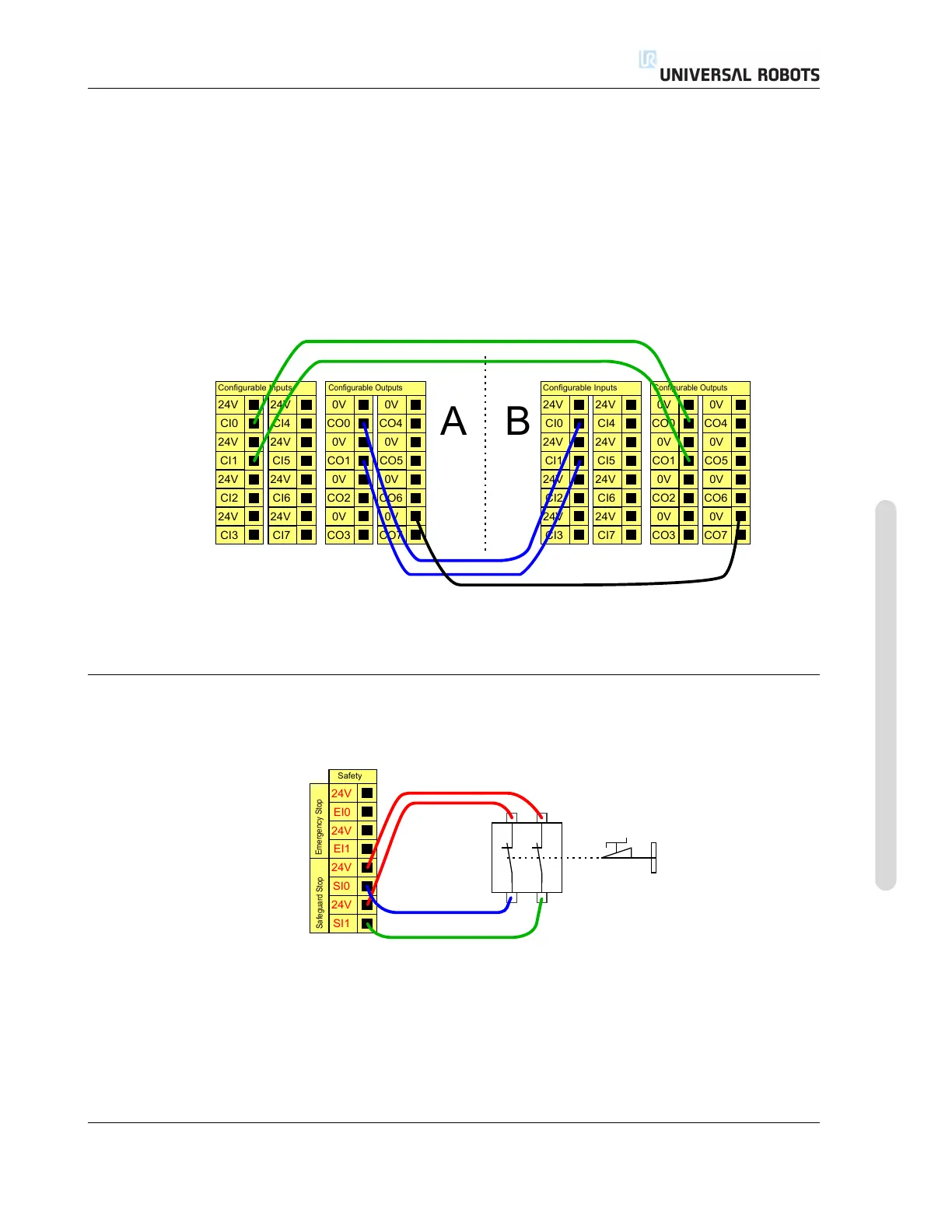
• Configurable input pair: External emergency stop.
• Configurable output pair: System emergency stop.
The illustration below shows how two UR robots share their emergency stop functions. In this
example the configured I/Os used are “CI0-CI1” and “CO0-CO1”.
24V
CI1
24V
CI2
24V
CI3
24V
CI0
Configurable Inputs
24V
CI5
24V
CI6
24V
CI7
24V
CI4
0V
CO1
0V
CO2
0V
CO3
0V
CO0
Configurable Outputs
0V
CO5
0V
CO6
0V
CO7
0V
CO4
24V
CI1
24V
CI2
24V
CI3
24V
CI0
Configurable Inputs
24V
CI5
24V
CI6
24V
CI7
24V
CI4
0V
CO1
0V
CO2
0V
CO3
0V
CO0
Configurable Outputs
0V
CO5
0V
CO6
0V
CO7
0V
CO4
A
B
If more than two UR robots or other machines need to be connected, a safety PLC is needed to
control the emergency stop signals.
5.3.2.4 Safeguard stop with automatic resume
An example of a basic safeguard stop device is a door switch where the robot is stopped when a
door is opened, see illustration below.
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
This configuration is only intended for application where the operator cannot pass the door and
close it behind him. The configurable I/O can be used to setup a reset button outside the door, to
reactivate robot motion.
Another example where automatic resume can be appropriate is when using a safety mat or a
safety-related laser scanner, see below.
Version 3.10
Copyright © 2009–2019 by Universal Robots A/S. All rights reserved.
I-35 UR3/CB3