13.12 Installation → Features
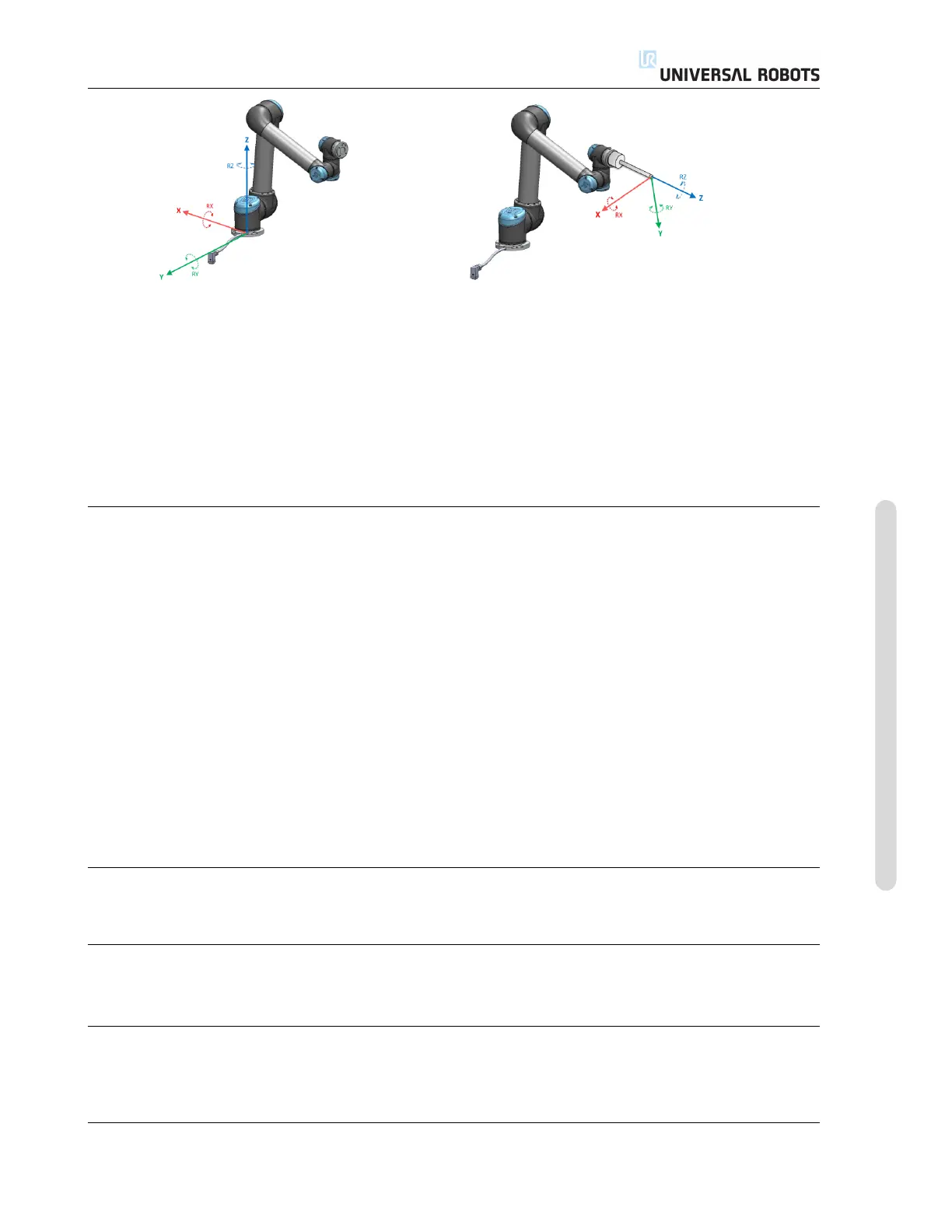
Figure 13.1: Base feature
Figure 13.2: Tool (TCP) feature
however, the user must point the TCP in the direction of the conveyor movement.
Using more points to define the pose of a table means that the orientation is based on the positions
rather than the orientation of a single TCP. A single TCP orientation is harder to configure with
high precision.
To learn about the different methods to define a feature see (sections: 13.12.2), (13.12.3)
and (13.12.4).
13.12.1 Using a feature
When a feature is defined in the installation, you can refer to it from the robot program to relate
robot movements (e.g. MoveL and MoveP commands) to the feature (see section 14.5).
This allows for easy adaptation of a robot program (e.g., when there are multiple robot stations,
when an object is moved during program runtime, or when an object is permanently moved in the
scene). By adjusting the feature of an object, all program movements relative to the object is moved
accordingly. For further examples, see (sections 13.12.5) and (13.12.6).
Features configured as joggable are also useful tools when manually moving the robot in the Move
Tab (section 13.1) or the Pose Editor screen (see 12.2). When a feature is chosen as a
reference, the Move Tool buttons for translation and rotation operate in the selected feature space
(see 13.1.2) and (13.1.3), reading of the TCP coordinates. For example, if a table is defined
as a feature and is chosen as a reference in the Move Tab, the translation arrows (i.e., up/down,
left/right, forward/backward) move the robot in these directions relative to the table. Additionally,
the TCP coordinates will be in the frame of the table.
Rename
This button renames a feature.
Delete
This button deletes a selected feature and any of its sub-features.
Show Axes
Choose whether the coordinate axes of the selected feature should be visible on the 3D graphics.
The choice applies on this screen and on the Move screen.
Version 3.10
Copyright © 2009–2019 by Universal Robots A/S. All rights reserved.
II-55 CB3

 Loading...
Loading...






