13.12 Installation → Features
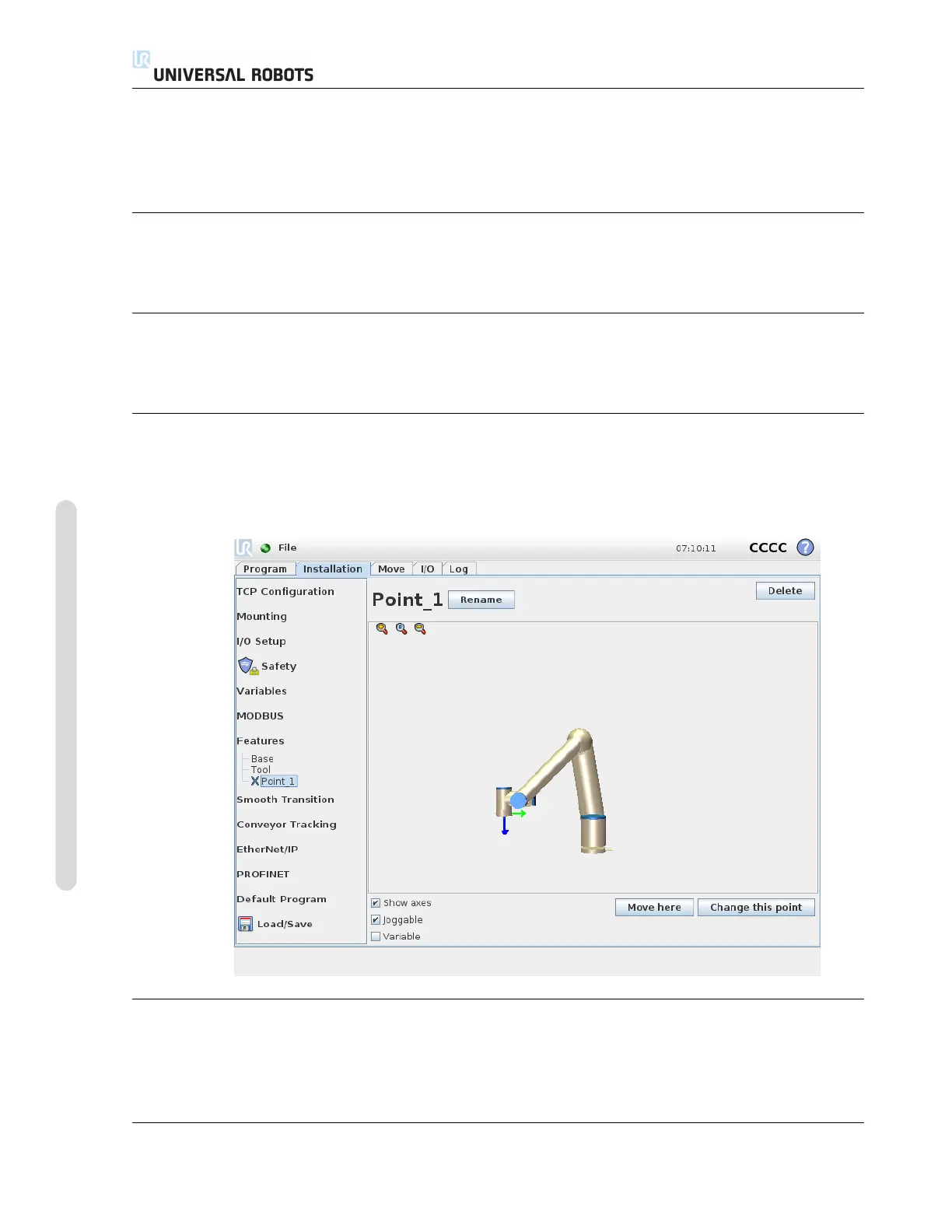
Changing the point
Use the Change this point button to set or change the selected feature. The Move tab (section
13.1) appears and a new feature position can be set.
Joggable
Choose whether the selected feature should be joggable. This determines whether the feature will
appear in the feature menu on the Move screen.
Using Move robot here
Push the Move robot here button to move the Robot arm towards the selected feature. At the end
of this movement, the coordinate systems of the feature and the TCP will coincide.
13.12.2 New Point
Push the Pointbutton to add a point feature to the installation. The point feature defines a safety
boundary or a global home configuration of the Robot arm. The point feature pose is defined as the
position and orientation of the TCP.
13.12.3 New Line
Push the Line button to add a line feature to the installation. The line feature defines lines that the
robot needs to follow. (e.g., when using conveyor tracking). A line l is defined as an axis between
two point features p1 and p2 as shown in figure 13.3.
CB3 II-56 Version 3.10
Copyright © 2009–2019 by Universal Robots A/S. All rights reserved.

 Loading...
Loading...






