DVP15MC11T Operation Manual
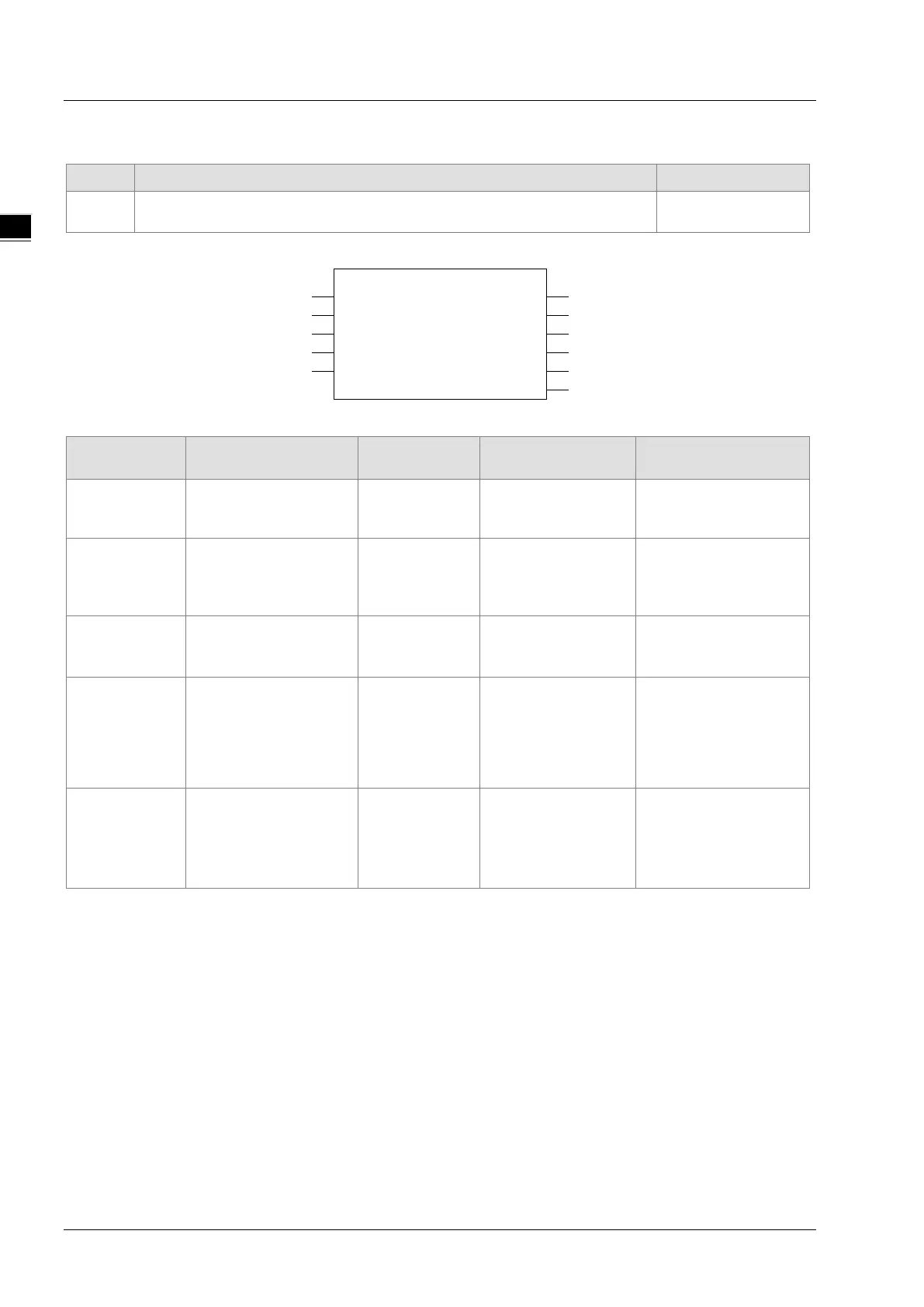
11.3.4 MC_Halt
FB/FC Explanation Applicable model
FB
MC_Halt is used to make the axis decelerate at a given deceleration rate till
it stops.
DVP15MC11T
Input Parameters
Function Data type
Validation timing
Axis
the axis which is to be
USINT
(The variable value
When Execute
from FALSE to TRUE
Execute
executed when
Execute changes from
BOOL
TRUE or FALSE
(FALSE)
-
Deceleration
deceleration rate.
(Unit: Unit/s
2
)
LREAL
(The variable value
must be set)
When Execute
from FALSE to TRUE
Jerk
of the target
acceleration or
deceleration.
3
LREAL
Positive number
(The variable value
must be set)
When Execute
from FALSE to TRUE
BufferMode
when executing two
instructions.
0: Aborting
1: Buffered
MC_Buffer_
Mode
0: mcAborting
1: mcBuffered
(0)
When Execute
from FALSE to TRUE
Note:
1. MC_Halt instruction is executed when Execute changes from FALSE to TRUE. There is no impact on
the instruction execution when Execute of the instruction changes from TRUE to FALSE in the course
of the instruction execution.
2. While Execute changes from FALSE to TRUE once more in the course of execution of MC_Halt,
there is no impact on the instruction execution and the instruction will continue being executed in the
previous way. When Execute changes from FALSE to TRUE once again after the instruction
execution is completed, the instruction can be re-executed.
3. Refer to section10.2 for the relation between Deceleration and Jerk.
4. Refer to section10.3 for details on BufferMode.
MC_Halt
Axis Done
MC_Halt_instance
Execute
Deceleration
Busy
Active
Jerk
Error
ErrorID
CommandAborted
BufferMode
11-26

 Loading...
Loading...




