Chapter 12 Troubleshooting
1
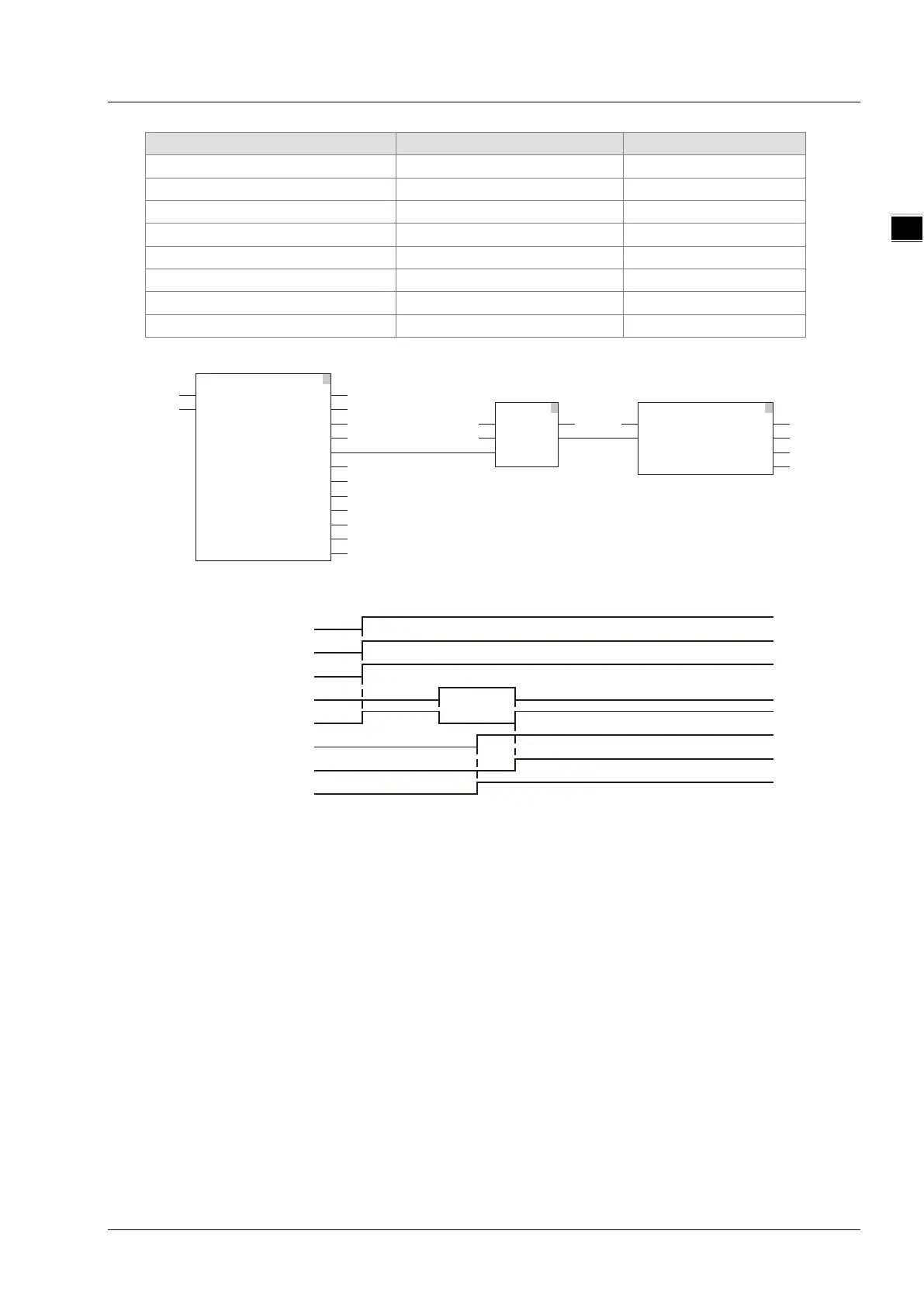
2. Timing Chart
When ReadSt_En changes from FALSE to TRUE after the servo axis is enabled, ResdSt_Vald
and ResdSt_Bsy change to TRUE and the axis is in Standstill state.
AND_In1 is set from FALSE to TRUE when the axis enters the ErrorStop state and MC_Reset
is executed. Rset_Busy is TRUE in the first cycle and Rset_Done is TRUE in the second cycle.
Meanwhile, the axis enters the Standstill state from the ErrorStop state.
32
1
ReadSt_Bsy
ReadSt_Err
ReadSt_ErrID
ReadSt_Disbl
ReadSt_Vald
ReadSt_Homi
ReadSt_Stans
ReadSt_Dism
ReadSt_Conm
ReadSt_Sym
ReadSt_Stopi
Axis1
ReadSt_En
MC_ReadStatus
Axis Valid
ReadSt
Enable Busy
Error
ErrorID
ErrorStop
Disabled
Homing
Standstill
DiscreteMotion
ContinuousMotion
Stopping
SyncMotion
Rset_Bsy
Rset_Done
Rset_Err
Rset_ErrID
Axis1
MC_Reset
Axis Done
Rset
Execute Busy
Error
ErrorID
AND
EN ENO
In1 Ou t
In2
AND1_In1
TRUE
ReadSt_En
ReadSt_Valid
ReadSt_Bsy
ReadSt_ErrStp
ReadSt_Stans
AND_In1
Rset_Done
Rset_Bsy
11-89

 Loading...
Loading...




