DVP15MC11T Operation Manual
11.3.14 DMC_SetTorque
FB
DMC_SetTorque sets the torque of the servo axis. The servo axis will
work under the torque mode when the instruction is executed.
DVP15MC11T
Input Parameters
Function Data type
Validation timing
Axis
Specify the number of the axis
which is to be controlled.
USINT
1~32
(The variable
value must be set)
When Enable
changes to TRUE
Enable
The instruction is executed when
Enable changes from FALSE to
TRUE.
BOOL
TRUE or FALSE
(FALSE)
-
TargetTorque
Specify the value of the target
torque.
The torque is expressed with the
permillage of the rated torque of
the servo axis. For example, the
setting value 30 indicates that the
set torque is 30‰ of the rated
torque of the servo axis. While
Enable is TRUE, modifying the
parameter value will change the
torque directly.
INT
Negative number,
positive number
and 0
(0)
When Enable
changes to TRUE
Notes:
1. If the torque value is a positive number, the effection that the servo produces works in the positive
direction. If the torque value is a negative number, the effection that the servo produces works in the
negative direction.
2. When Enable is TRUE, the instruction is always valid and the torque changes accordingly as the
torque value is modified. The instruction cannot be aborted by other instructions excluding MC_Stop.
When Enable of the instruction is reset to FALSE, the instruction execution stops and other
instruction can be executed.
Output Parameters
Parameter name Function Data type Valid range
InTorque TRUE when the target torque is reached. BOOL TRUE / FALSE
Busy TRUE when the instruction is being executed. BOOL TRUE / FALSE
Active TRUE when the axis is being controlled. BOOL TRUE / FALSE
CommandAborted
TRUE when the instruction is aborted. BOOL
TRUE / FALSE
Error
TRUE when an error occurs in execution of the
BOOL TRUE / FALSE
ErrorID
Contains the error code when an error occurs.
WORD
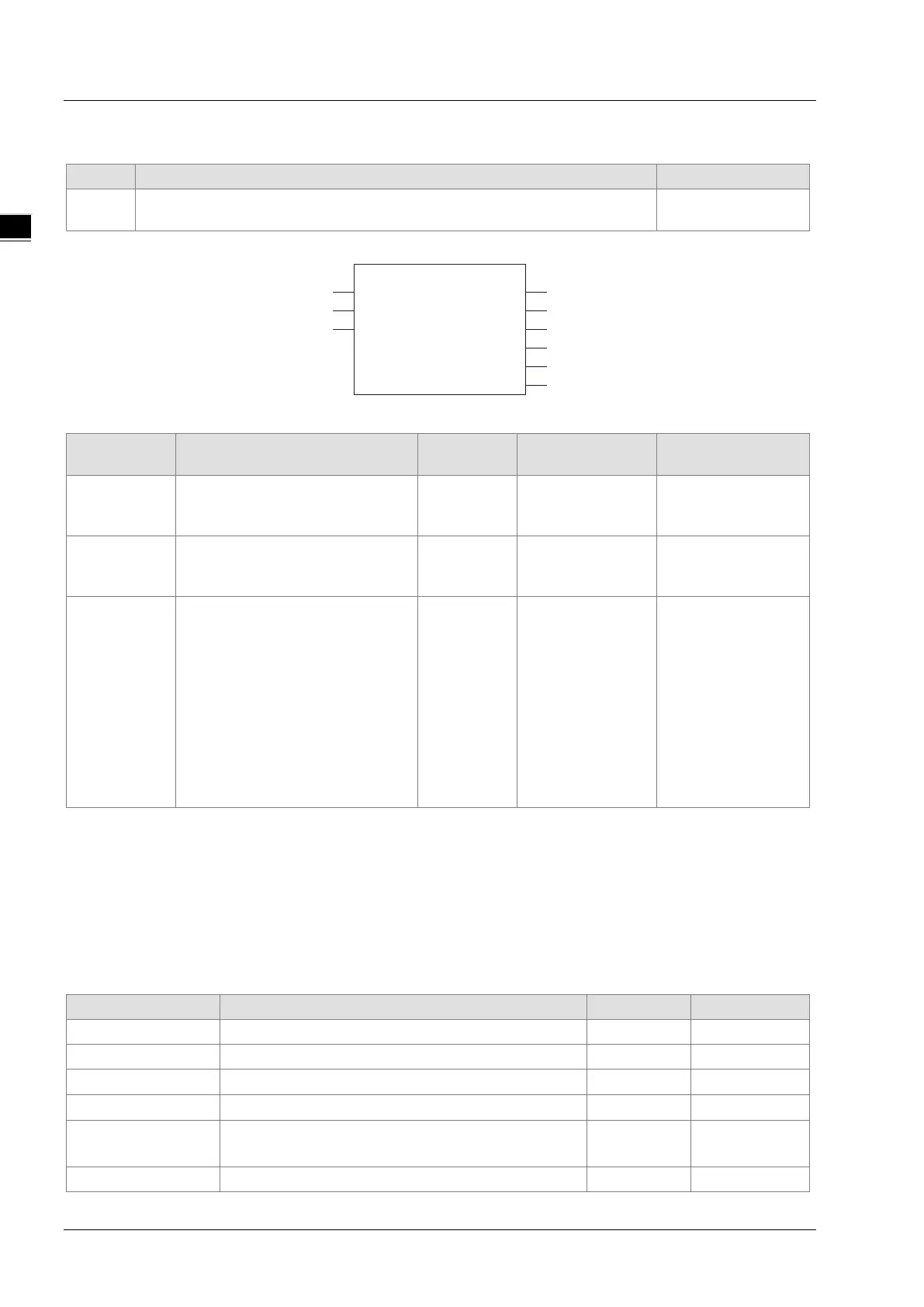
DMC_SetTorque
Axis InTorque
DMC_SetTorque_instance
Enable
TargetTorque
Busy
Active
CommandAborted
Error
ErrorID
11-90