Chapter 12 Troubleshooting
1
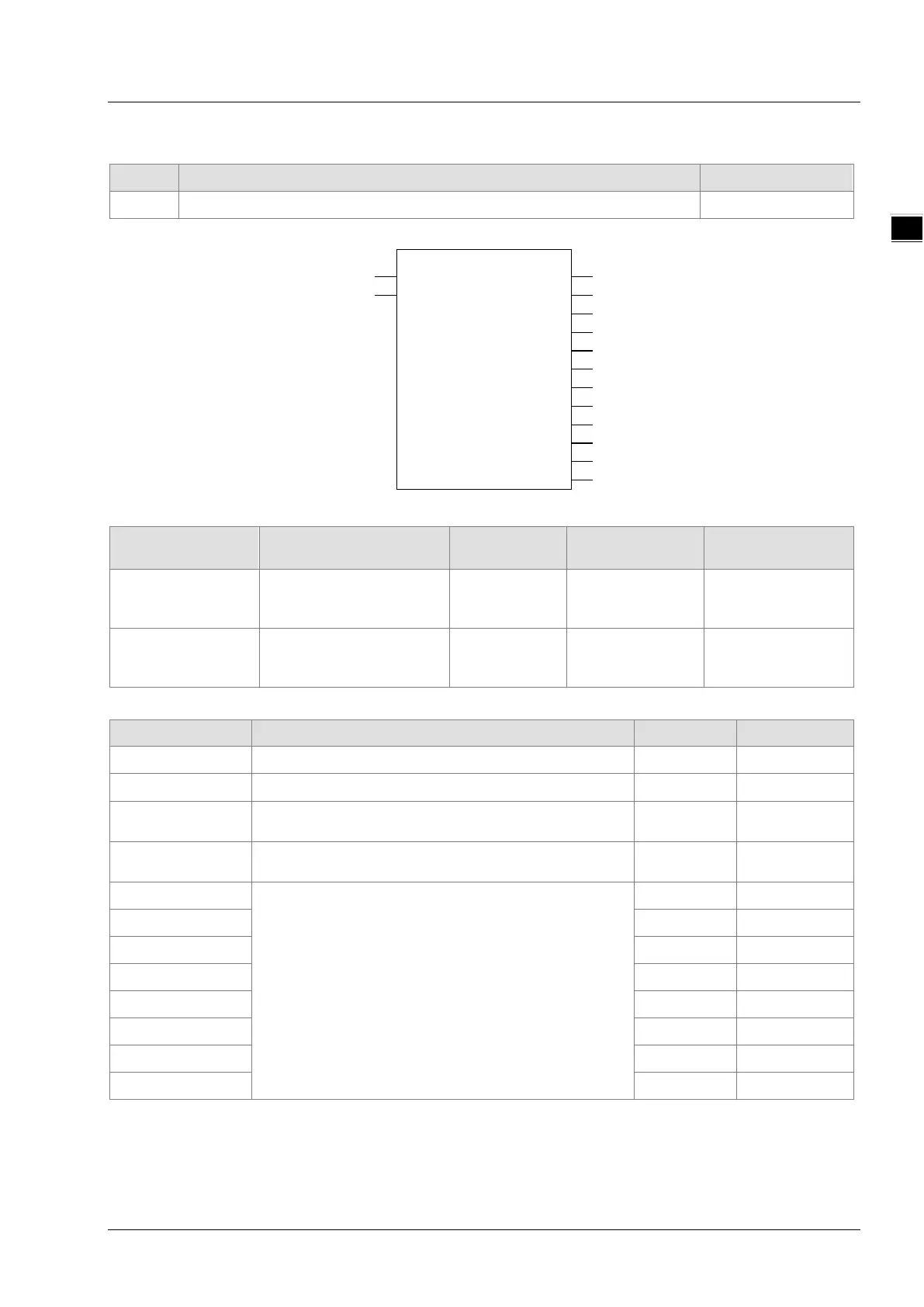
11.3.17 MC_ReadStatus
FB/FC Explanation Applicable model
FB
MC_ReadStatus is used to read the servo axis state in the controller. DVP15MC11T
Input Parameters
Parameter name Function Data type
Validation timing
Axis
Specify the number of the
axis which is to be
USINT
(The variable
When Enable
changes to TRUE
Enable
executed when Enable
BOOL
TRUE or FALSE
(FALSE)
-
Output Parameters
Parameter name Function Data type Valid range
Valid TRUE when the output of the instruction is valid. BOOL TRUE / FALSE
Busy TRUE while the instruction is being executed. BOOL TRUE / FALSE
Error
TRUE while there is an error in the execution of the
instruction.
BOOL TRUE / FALSE
ErrorID
Contains error codes when an error occurs. Please
refer to section 12.2 for the corresponding error code.
WORD
ErrorStop
Refer to section 10.4.
BOOL TRUE / FALSE
Disabled BOOL TRUE / FALSE
Stopping BOOL TRUE / FALSE
Homing BOOL TRUE / FALSE
Standstill BOOL TRUE / FALSE
DiscreteMotion BOOL TRUE / FALSE
ContinuousMotion BOOL TRUE / FALSE
SyncMotion BOOL TRUE / FALSE
Notes:
1. When Enable changes from FALSE to TRUE, the execution of MC_ReadStatus starts and the axis
status is read.
MC_ReadStatus
Axis Valid
MC_ReadStatus_instance
Enable Busy
Error
ErrorID
ErrorStop
Disabled
Homing
Standstill
DiscreteMotion
ContinuousMotion
Stopping
SyncMotion
11-101

 Loading...
Loading...




