6 Basic Control Functions
6-4
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
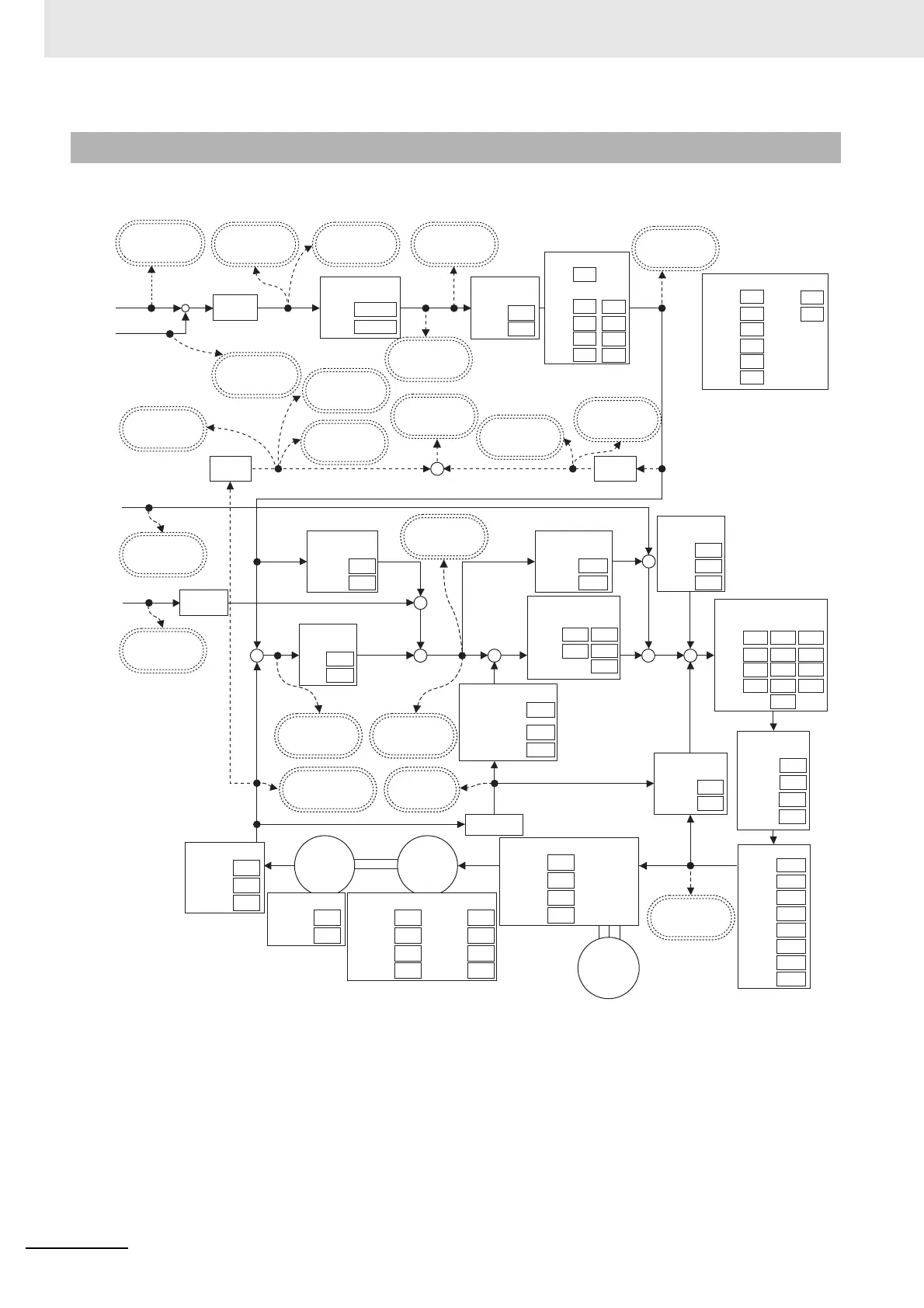
The following block diagram is for position control using an R88D-KN-ECT-L-series Servo Drive.
Note 1 Numbers within parentheses are sub-index numbers.
2 Numbers within boxes are hexadecimal index numbers.
3 Profile position mode (pp) and Homing mode (hm) are also included in this block diagram.
4 Read the word "torque" as "force."
6-1-2 Block Diagram for Position Control Mode
Speed
Feed-forward
Gain 3110
Filter 3111
6091(01)
6091(02)
FIR
3818
3222
+
−
Position
Control
1 3100
2 3105
+
+
1
3214
2
3216
3
3218
3215
3217
32
19
4
3220 3221
3213
+
−
3607
3608
3609
3623
3624
Setting 2
3114
Mode
3115
Delay Time
3116
Level
3117
Hysteresis
3118
Switching Time
3119
Setting 3
3605
Ratio
3606
3112
3113
+ −
+
+
+ +
+
Notch Filter
3203
3206
3209
3212
Depth
3202
3205
3208
3211
Width
1
3201
2
3204
3
3207
4
3210
Frequency
Adaptive Filter Selection
3200
3102
3107
Proportional
Integral
Inertia Ratio
1 3101
2 3106
3004
+
+
+
+
607A hex
Target position
[command units]
6062 hex
Position demand
value [command
units]
Velocity Demand
Value [command
units/s]
Motor Velocity
Demand Value
[mm/s]
Motor Velocity
Demand Value After
Filtering [mm/s]
Gear ratio forward
conversion
Numerator
Denominator
Smoothing
filter
First-order
Lag
Damping Control
Filter
selection
Frequency
Filter
Gain Switching
60FC hex
Position demand
internal value
[encoder pulses]
60BA or 60BC hex
Touch probe pos
1/2 pos value
[command units]
606C hex
Velocity actual
value [command
units/s]
6064 hex
Position actual value
[command units]
60F4 hex
Following error
actual value
[command units]
Position Demand
Value After Filtering
[command units]
Velocity Demand Value
After Filtering
[command units/s]
Electronic
gear reverse
conversion
Electronic
gear reverse
conversion
60B2 hex
Torque offset
[0.1%]
60B1 hex
Velocity offset
[command units/s]
60FA hex
Control effort
[command units/s]
Force
Feed-forward
Gain
Filter
Friction
compensation
Offset Value
Positive
Negative
Speed FF
unit
conversion
Speed Control
Following Error
Actual Internal Value
[External encoder
pulses]
Motor Control
Effort [mm/s]
6063 hex
Position actual internal
value [External
encoder pulses]
Motor Velocity
Actual Value
[
mm/s
]
Disturbance
Observer
Gain
Filter
3915
Two-stage
Time
Speed detection
External
Encoder
Motor
6074 or 6077 hex
Torque demand or
Torque actual value
[0.1%]
3103
3108
3610
Speed Detection Filter
Speed Feedback Filter
Time Constant 1
Speed Feedback Filter
Time Constant 2
Function Expansion
Setting
Generate
Position
Command
+
+
60B0 hex
Position offset
[command units]
1
2
Force
Filter
3109
3916
Two-stage
Attenuation
3104
3521
60E0
60E1
3013
3522
3525
3526
MAX 6072
Force limit
Selection
Positive
Negative
1
2
3
4
3922~3928
3912
3913
3914
3920
Magnetic Pole
Detection
Objects Related to
Magnetic Pole
position estimation
Current control
Current Response
Proportional
Integral
Main
power
supply
3323
3326
3327
3901
3910
3902
3904
3905
3906
3907
3908
3909
3910
Motor Specifications
Rated Current
Peak Current
Phase Inductance
Phase Resistance
Overspeed level
Pole Pitch
Mass
Rated Force
Type
Reverse
Phase-Z
Disabled
Encoder Specifications
Resolution
Overspeed
level
Input Settings

 Loading...
Loading...

