7 Applied Functions
7-16
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
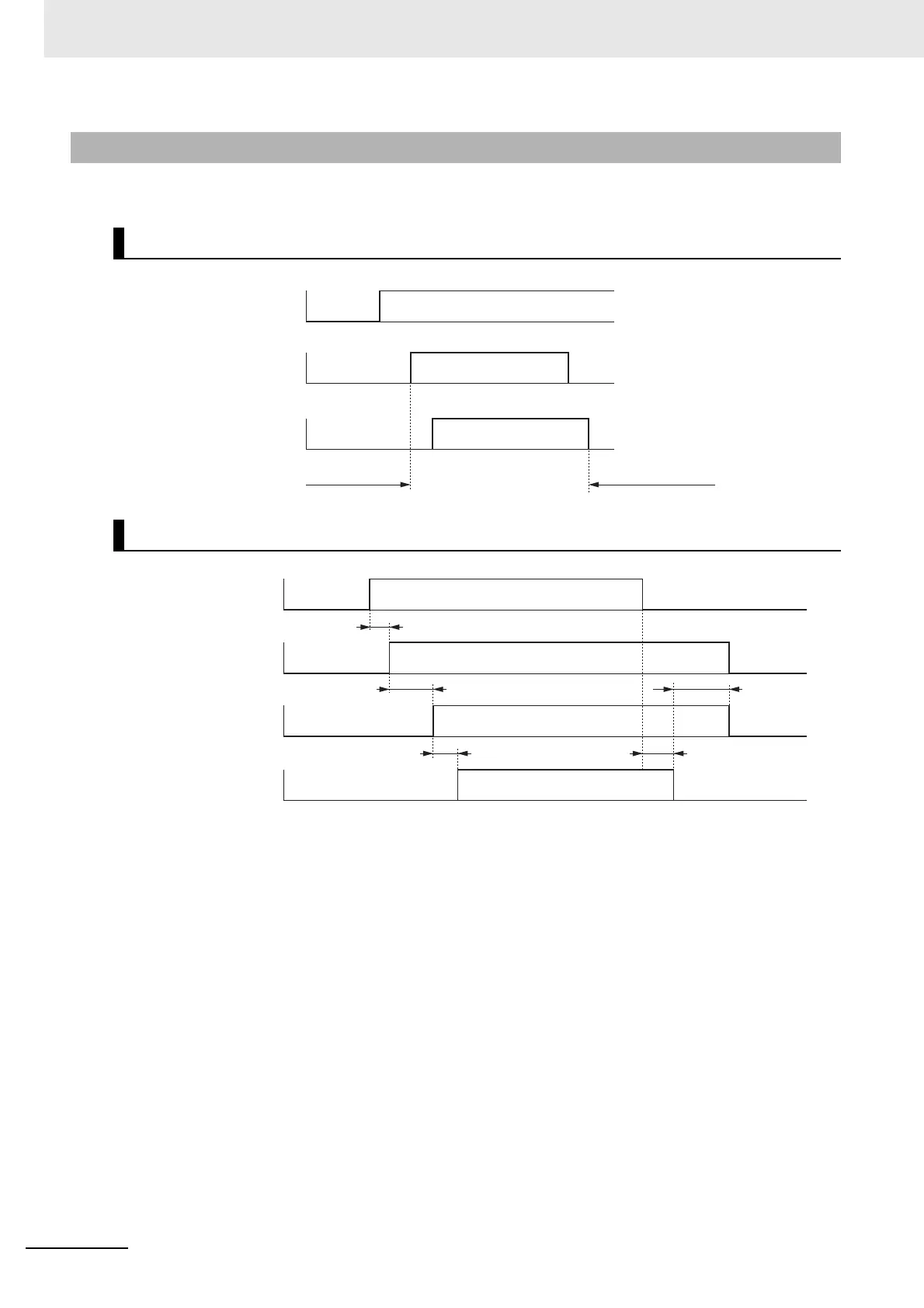
This section shows the timing of the Brake Interlock Output (BKIR).
*1 The servo does not turn ON until the motor speed drops to approx. 30 mm/s or below.
*2 The operation of the dynamic brake when the servo is OFF depends on the setting of the Disable operation option code
(605C hex).
*3 The Brake Interlock Output (BKIR) signal is output either when a release request command is received via Servo controls
or when a release request command is received via EtherCAT communications. The above example shows when there is
no brake release request from EtherCAT communications. The BKIR is assigned to the general-purpose output (CN1).
7-5-2 Operation Timing
Basic Timing
Servo ON/OFF Operation Timing When Motor is Stopped
ON
OFF
ON
OFF
ON
OFF
OFF ON
Servo ON/OFF
Brake Interlock
Output (BKIR)
Servo OFF Servo ON Servo OFF
Request to release brake
Forced-braking is possible. Forced-braking is possible.
Control power supply
(L1C and L2C)
3437 hex
1 to 6ms
ON
OFF
ON
OFF
ON
OFF
Servo ON/OFF
OFF
Brake Interlock
Output (BKIR)
*3
Dynamic brake
Motor power supply
Released
Engaged
Servo
DB engaged
*1
DB engaged
*2
DB released
Power supply
No power supply No power supply
Release request
Servo ON
*1
Servo OFF
Approx. 4 ms
Approx. 60 ms
Approx. 2 ms

 Loading...
Loading...

