3-5
3 Specifications
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
3-1 Servo Drive Specifications
3
3-1-3 EtherCAT Communications Specifications
The EtherCAT twisted-pair cable is connected to a shielded connector.
• Electrical characteristics: Conforms to IEEE 802.3.
• Connector structure: RJ45 8-pin modular connector (conforms to ISO 8877)
3-1-3 EtherCAT Communications Specifications
Item Specification
Communications standard IEC 61158 Type 12, IEC 61800-7 CiA 402 Drive Profile
Physical layer 100BASE-TX (IEEE802.3)
Connectors RJ45 2 (shielded)
ECAT IN: EtherCAT input
ECAT OUT: EtherCAT output
Communications media Ethernet Category 5 (100BASE-TX) or higher (twisted-pair cable with double,
aluminum tape and braided shielding) is recommended.
Communications distance Distance between nodes: 100 m max.
Process data Fixed PDO mapping
Mailbox (CoE) Emergency messages, SDO requests, SDO responses, and SDO information
Distributed clock (DC) Synchronization in DC mode.
DC cycle: 250 s, 500 s, 1 ms, 2 ms, 4 ms
Indicators L/A IN (Link/Activity IN) 1
L/A OUT (Link/Activity OUT) 1
RUN 1
ERR 1
CiA402 Drive Profile • Cyclic synchronous position mode
• Cyclic synchronous velocity mode
• Cyclic synchronous torque mode
• Profile potion mode
• Homing mode
• Touch probe function (Latch function)
• Torque limit function (Force limit function)
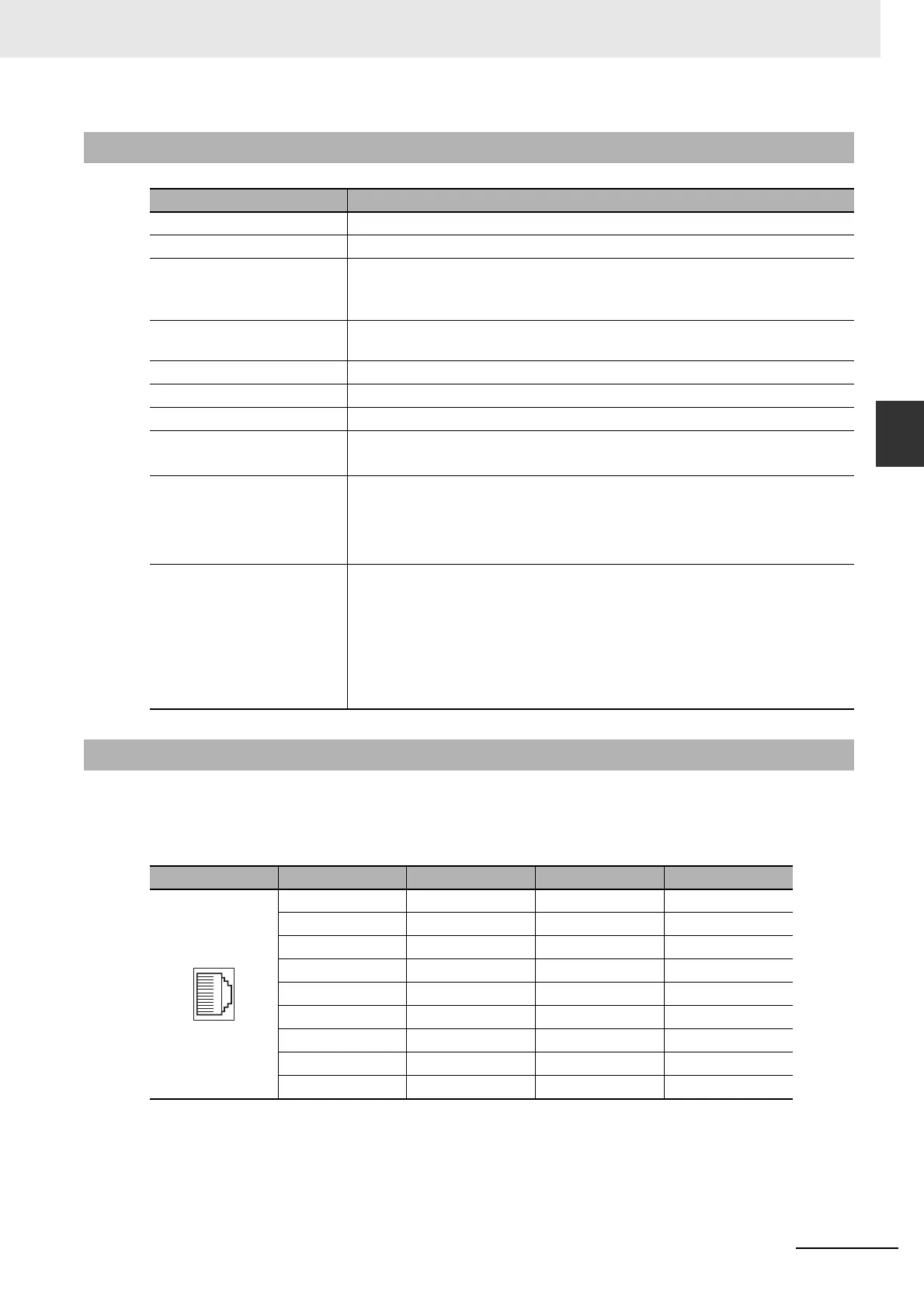
3-1-4 EtherCAT Communications Connector Specifications (RJ45)
Pin No. Signal name Abbreviation Direction
1 Send data + TD+ Output
2 Send data TD Output
3 Receive data + RD+ Input
4 Not used
5 Not used
6 Receive data RD Input
7 Not used
8 Not used
Connector hood Protective ground FG

 Loading...
Loading...

