11-33
11 Adjustment Functions
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
11-11 Instantaneous Speed Observer
Function
11
11-11-1 Operating Conditions
11-11 Instantaneous Speed Observer Function
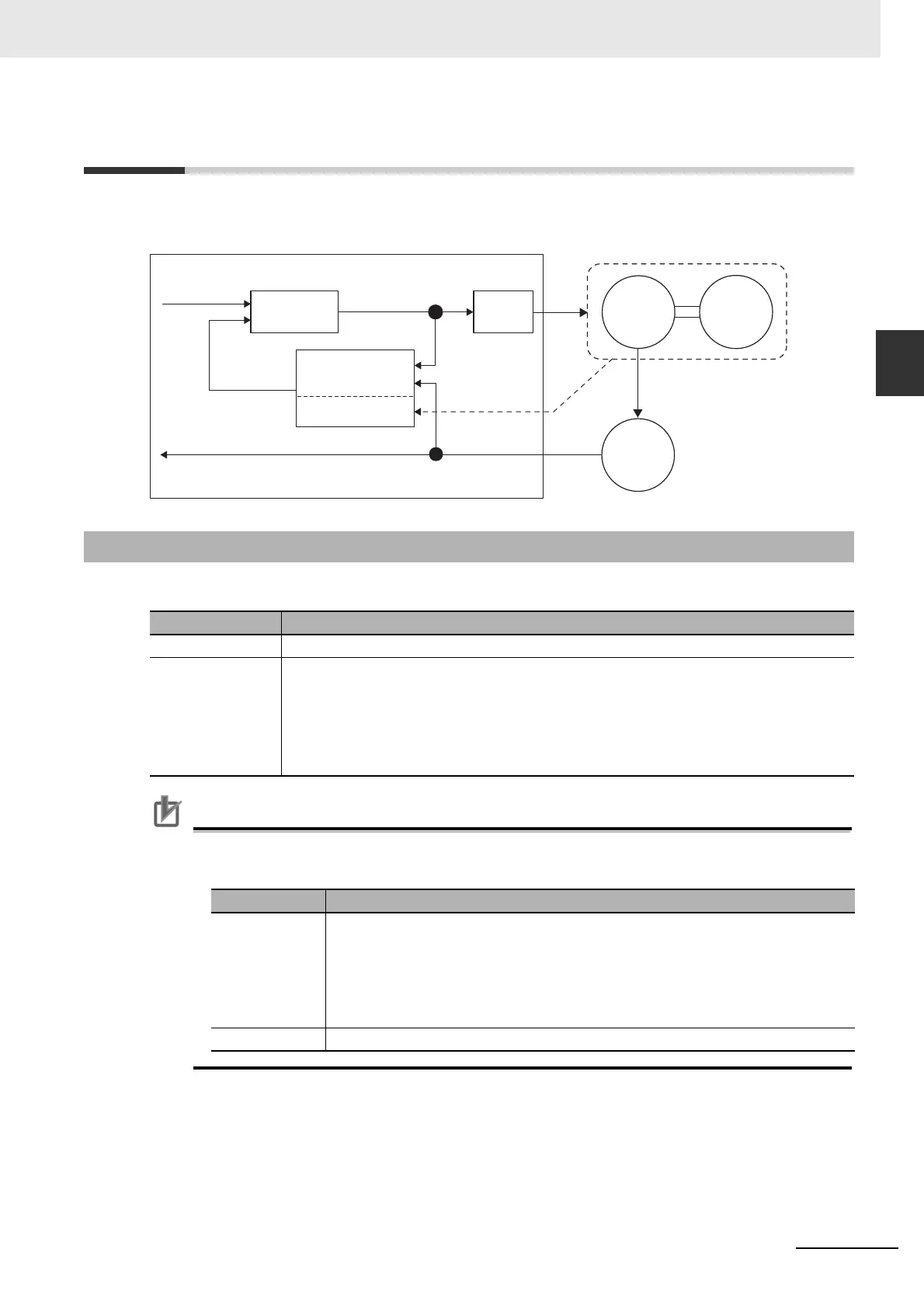
This function uses a load model to estimate the motor speed. It improves the speed detection accuracy
and can provide both high responsiveness and minimum vibration when stopping.
The instantaneous speed observer function can be used in the following conditions.
Precautions for Correct UsePrecautions for Correct Use
The instantaneous speed observer function may not operate properly or the effect may not be
apparent under the following conditions.
11-11-1 Operating Conditions
Operating conditions
Operating mode Position control mode, Speed control mode
Others • When Servo is ON.
• When elements other than control parameters, such as the force limit, are set correctly
and there is no trouble with the motor's normal operation.
• When realtime autotuning function is disabled (The setting of 3002 hex is “0.”).
• Speed estimation operation is disabled when magnetic pole position estimation is in
progress.
Conditions that interfere with the adaptive filter
Load condition • If there is a substantial difference between the mass load when considering the
motor and mass as a whole and that of the actual equipment.
For example, if there is a large resonance point at a frequency of 300 Hz or lower
or if there is a non-linear element such as a large backlash.
• If the load mass changes.
• If there is a large disturbance force with high-frequency elements applied.
Others • If the stabilization range for positioning is small.
Current
control
Speed control
Speed estimation
value
Force
command
Instantaneous
speed observer
Load model
Motor
current
Motor
External
Encoder
Servo Drive
Motor
position
To position control
Load
(Mass)
Motor Controller
Effort

 Loading...
Loading...

