11 Adjustment Functions
11-28
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
11-9
Friction Force Compensation Function
Two types of friction force compensations can be set to reduce the influence of mechanical frictions.
• Unbalanced load compensation that offsets the constantly applied unbalance force
• Dynamic friction compensation that changes the offset direction in accordance with the operating
direction
You can use the function under the following conditions:
*1 Refer to 11-9-2 Objects Requiring Settings on page 11-28 for details.
The friction force compensation function needs the combined settings of following three objects.
11-9-1 Operating Conditions
Operating conditions
Operating mode
The operating mode depends on the control mode.
*1
Others • When Servo is ON.
• When elements other than control parameters, such as the force limit, are set correctly
and there is no trouble with the motor's normal operation.
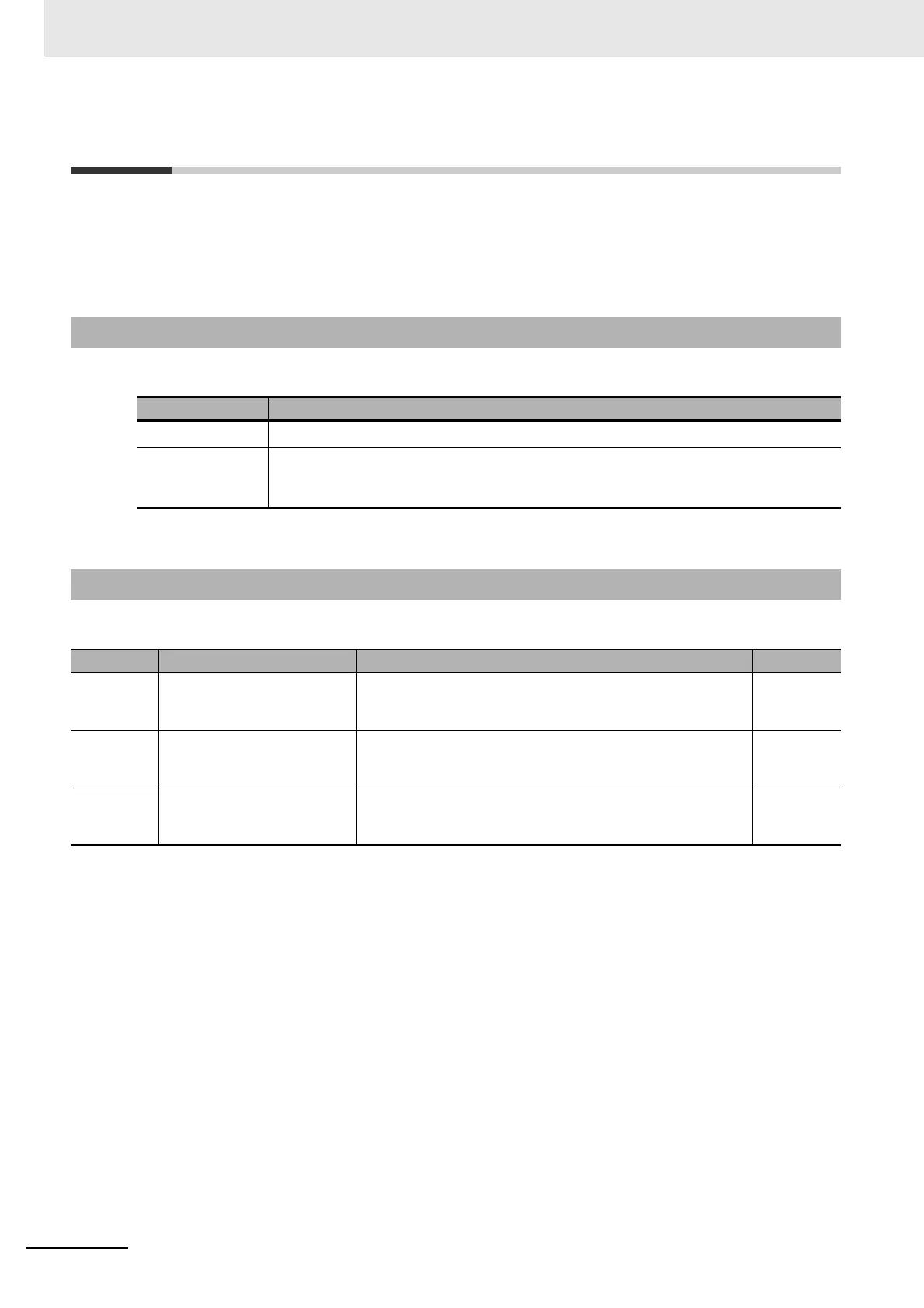
11-9-2 Objects Requiring Settings
Index Name Description Reference
3607 hex Force Command Value Offset Set the unbalanced load compensation value that is always
added to the force command in the control mode other than
force control.
page 9-43
3608 hex Positive Direction Force
Offset
Set the dynamic friction compensation value that is added to
the force command when a positive position command is input
for position control.
page 9-43
3609 hex Negative Direction Force
Offset
Set the dynamic friction compensation value that is added to
the force command when a negative position command is
input for position control.
page 9-43

 Loading...
Loading...

