Appendicies
A-6
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
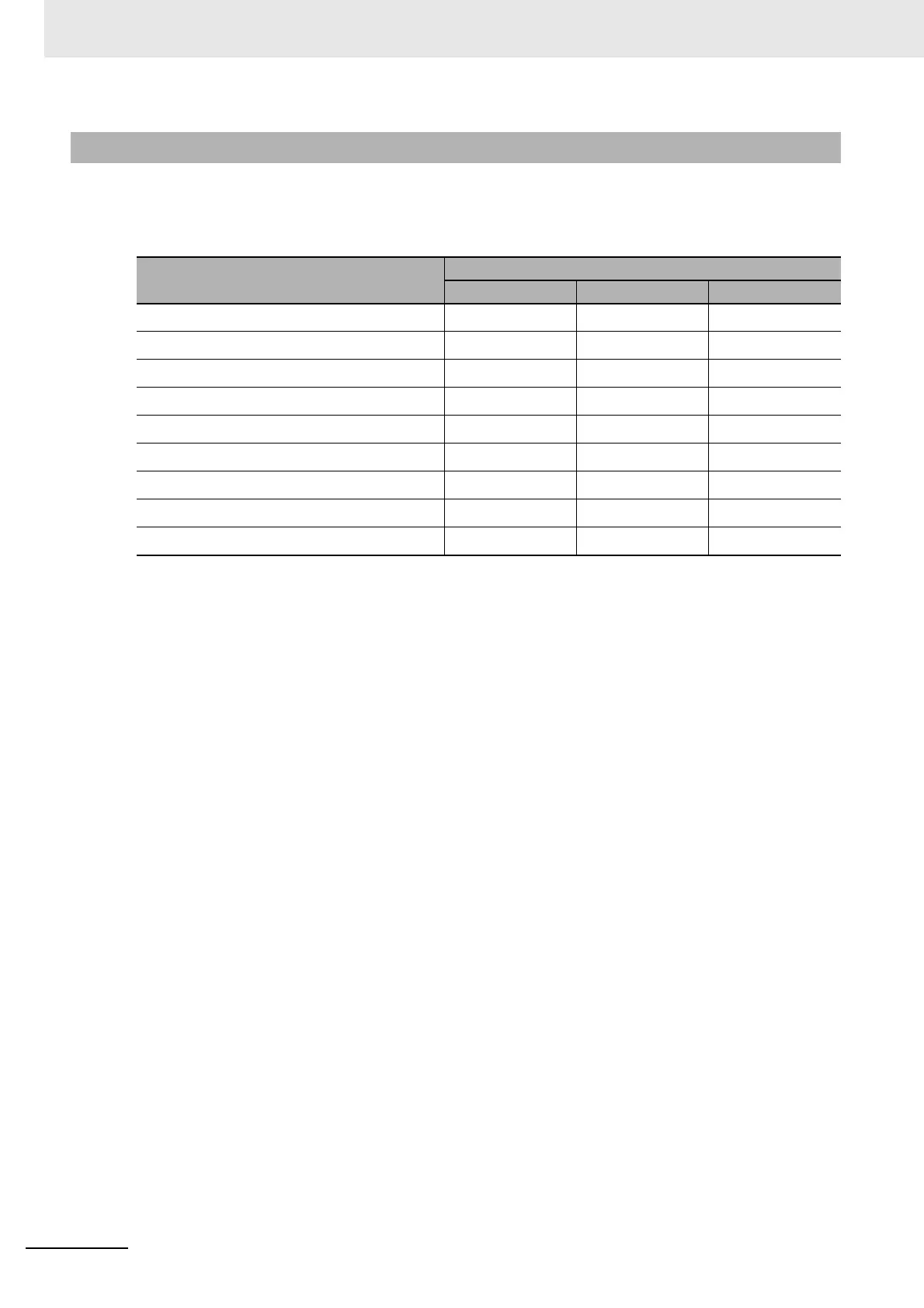
The relationships between the modes of operation of G5-series Servo Drives with built-in EtherCAT
communications and the application functions are shown below.
❍: Supported, : Not supported
*1 When one adaptive filter is enabled, notch 3 is set automatically. When two adaptive filters are enabled, notch
3 and notch 4 are set automatically.
*2 When Realtime Autotuning is enabled, you cannot use the force feed-forward function. (They are in an
exclusive relationship.)
*3 The FIR filter is enabled only in hm, pp and csp mode when the communications cycle is set to 1 ms or above.
*4 When Realtime Autotuning is enabled, the instantaneous speed observer and disturbance observer are
automatically disabled. Realtime Autotuning must be disabled to enable the instantaneous speed observer.
*5 When the instantaneous speed observer is enabled, the disturbance observer is automatically disabled.
*6 Realtime Autotuning and the instantaneous speed observer must be disabled to enable the disturbance
observer.
A-1-4 Modes of Operation and Applied Functions
Function
Mode of operation
csp pp hm csv cst
Notch filter (notch 1 to notch 4)
*1
❍❍❍
Damping filter
❍
Speed feed-forward
❍
Force feed-forward function
*2
❍❍
Position command FIR filter
*3
❍
Position command smoothing filter
❍
Realtime Autotuning
*4
❍❍❍
Instantaneous speed observer
*5
❍❍
Disturbance Observer
*6
❍❍

 Loading...
Loading...

