6 Basic Control Functions
6-14
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
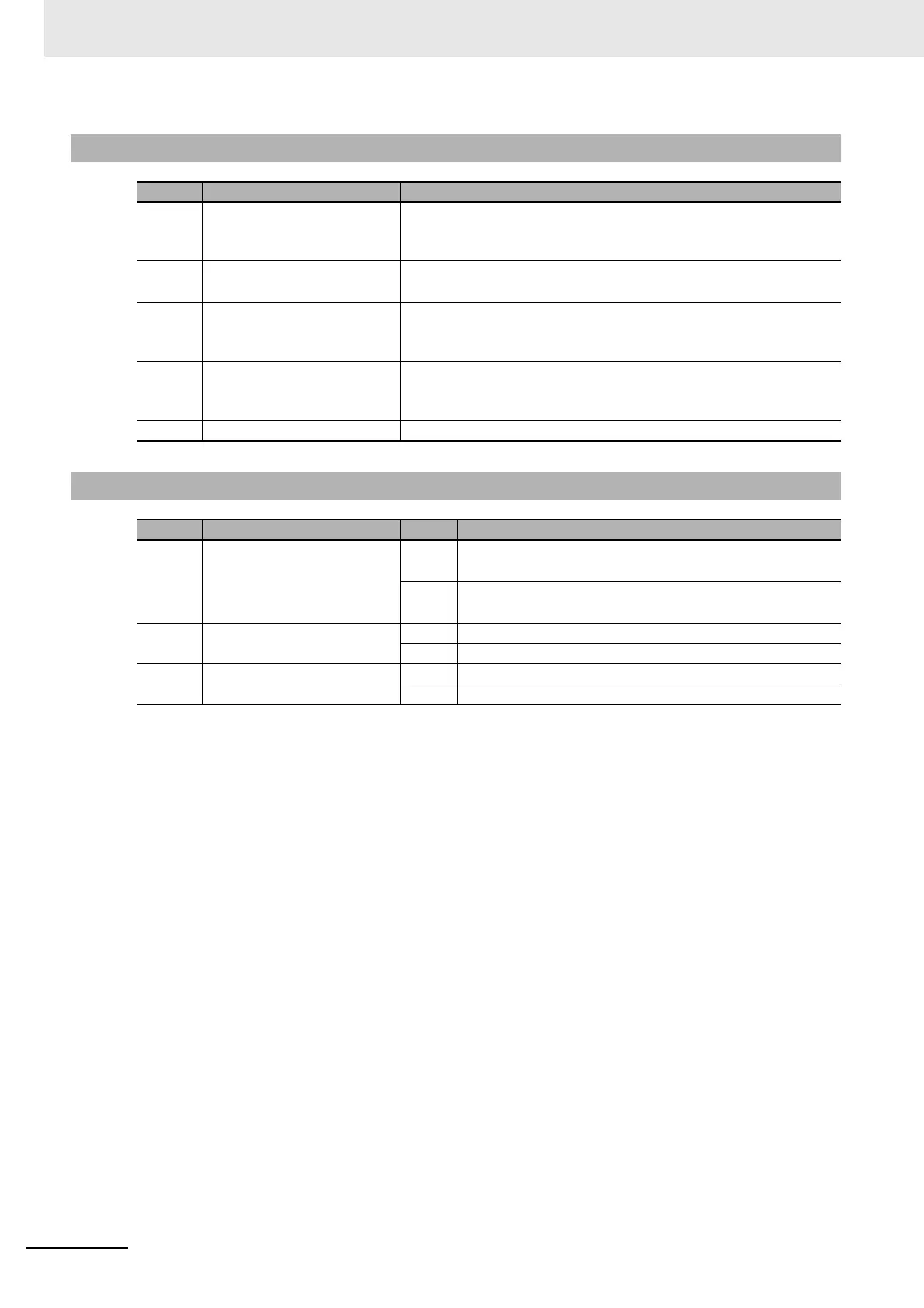
6-4-3 Controlword (6040 hex) in Profile Position Mode
Bit Name Description
4 New set-point Starts positioning at the rising edge, from 0 to 1, of the signal.
In this timing, the Target position (607A hex) and Profile velocity
(6081 hex) values are obtained.
5 Change set immediately Always set to 1 (Change set immediately).
If set to 0, positioning does not occur due to a Command warning.
6 abs/rel Always set to 0 (abs).
If set to 1 (rel), positioning does not occur due to a Command
warning.
8 Halt When set to 0, positioning starts or continues.
When set to 1, positioning stops according to the Halt option code
(605D hex) setting.
9 Change on Set-point Unused for G5-series Servo Drives.
6-4-4 Statusword (6041 hex) in Profile Position Mode
Bit Name Value Description
10 Target reached 0 Halt bit is 0:Positioning is not completed.
Halt bit is 1:The axis is decelerating.
1 Halt bit is 0:Positioning is completed.
Halt bit is 1:The axis speed is “0.”
12 Set-point acknowledge 0 Waiting for a new Target position.
1 Ready to accept updates (overwriting) of the Target position.
13 Following error 0 No Following error occurred.
1 A Following error occurred.

 Loading...
Loading...

