11-31
11 Adjustment Functions
G5 Series AC Servo Drives With Built-in EtherCAT Communications, Linear Motor Type
11-10 Feed-forward Function
11
11-10-2 Operating Procedure
1
Set the Speed Feed-forward Command Filter (3111 hex).
Set the Speed Feed-forward Command Filter (3111 hex) to approx. 50 (0.5 ms).
2
Adjust the Speed Feed-forward Gain (3110 hex).
Gradually increase the value of the Speed Feed-forward Gain (3110 hex) and finely adjust it to
avoid overshooting during acceleration/deceleration.
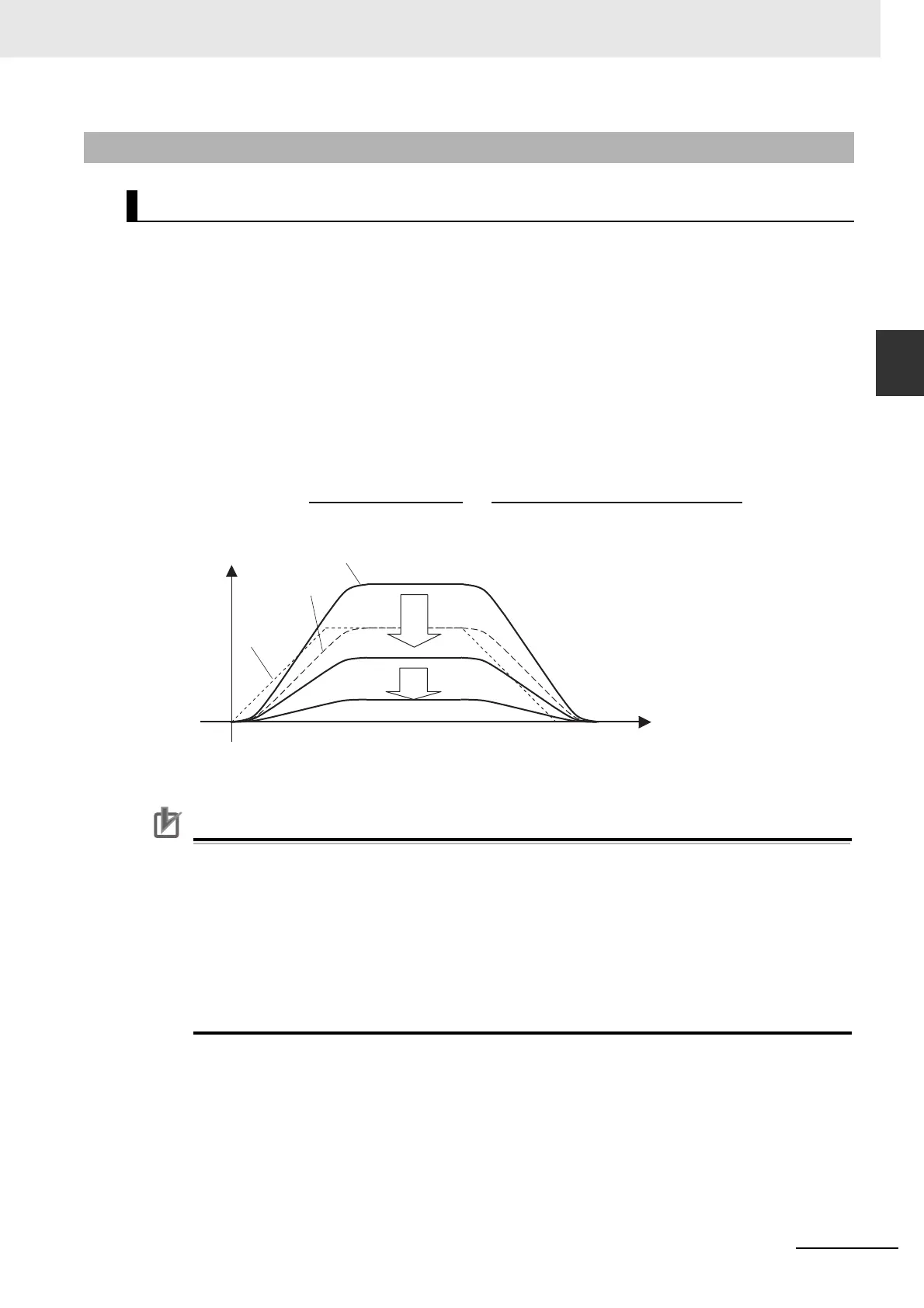
The position error during an operation at a certain speed will decrease based on the following
formula according to the speed feed-forward gain value.
The position error in the range of constant speed becomes smaller as the speed feed-forward
gain increases.
Precautions for Correct UsePrecautions for Correct Use
• If the speed feed-forward gain is set to 100%, the position error is calculated to 0. However,
large overshooting will occur during acceleration/deceleration.
• If the updating cycle of the position command input is longer than the Servo Drive control
cycle, or if the input command frequency is not uniform, the operating noise may increase
while the speed feed-forward is enabled. Apply the position command filter (first-order lag or
FIR smoothing) or increase the speed feed-forward filter setting.
• The force feed-forward function cannot be used when realtime autotuning is being used. Set
both the Force Feed-forward Gain (3112 hex) and Force Feed-forward Command Filter
(3113 hex) objects to 0.
11-10-2 Operating Procedure
Speed Feed-forward Operating Method
×
100
=
Position error
[command units]
Command speed
[command units/s]
Position loop gain [1/s]
(100 - Speed feed-forward gain [%])
Command
speed
Motor speed
Position error
Speed FF gain
50 [%]
80 [%]
0 [%]
Time

 Loading...
Loading...

