6-38
6
Torque Compensation for Sufficient Torque at Start and Low-speed
Operation
The torque compensation function detects a rising motor load, and increases the output torque.
In V/f control the inverter calculates the motor primary loss voltage using the terminal resistance value (E2-
05) and adjusts the output voltage (V) to compensate insufficient torque at startup and during low-speed oper-
ation.
The compensation voltage is calculated by the calculated Motor primary voltage loss × parameter C4-01.
In Open Loop Vector control the motor excitation current and the torque producing current are calculated and
controlled separately. The torque compensation affects the torque producing current only.
The torque producing current is calculated by the calculated torque reference × C4-01.
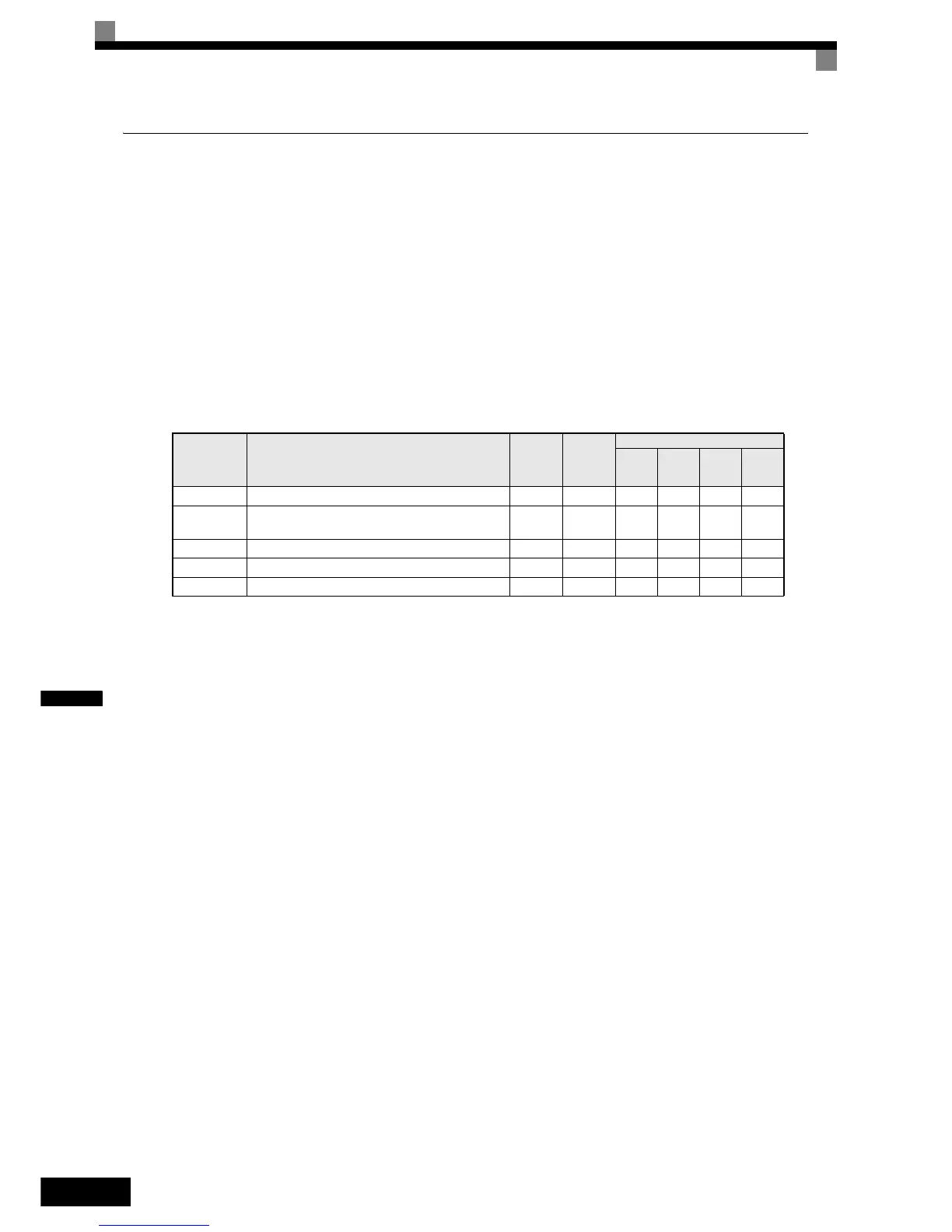
Related Parameters
Adjusting Torque Compensation Gain (C4-01)
Normally, there is no need to change this setting. If adjustments are necessary do the following:
Open Loop Vector control:
• If the torque response is slow increase the setting value.
• If vibrations occur decrease the setting value.
V/f control:
• If the cable is very long, increase the set value.
• If the motor capacity is smaller than the Inverter capacity (max. applicable motor capacity), increase the
set value.
• If the motor is vibrating, reduce the set value.
Setting precautions:
• Adjust this parameter so that the output current during low-speed rotation does not exceed the Inverter
rated output current range.
• Adjust the value in steps of 0.05 only.
Parameter
No.
Name
Factory
Setting
Change
during
Opera-
tion
Control Methods
V/f
V/f with
PG
Open
Loop
Vector
Closed
Loop
Vector
C4-01 Torque compensation gain 1.00 Yes A A A No
C4-02 Torque compensation delay time constant
200 ms
* 1
* 1. The factory setting will change when the control method is changed (V/f control factory settin is given).
No A A A No
C4-03 Starting torque compensation value (forward direction) 0.0 No No No A No
C4-04 Starting torque compensation value (reverse direction) 0.0 No No No A No
C4-05 Starting torque compensation time constant 1 ms No No No A No
 Loading...
Loading...








