20 Rockwell Automation Publication 2198-UM001D-EN-P - May 2014
Chapter 1 Start
Typical Communication
Configurations
The Kinetix 5500 drives support any Ethernet topology including linear, ring,
and star.
These examples feature the CompactLogix 5370 programmable automation
controllers (catalog number 1769-L36ERM) with support for Integrated Motion
over the EtherNet/IP network. Controller features include the following:
• Supports up to 16 axes
• Supports up to 48 devices in linear configurations
• Dual-port connectivity to support device-level ring (DLR) topology
Refer to CompactLogix Controllers Specifications Technical Data, publication
1769-TD005
, for more information on CompactLogix 5370 L1, L2, and L3
controllers.
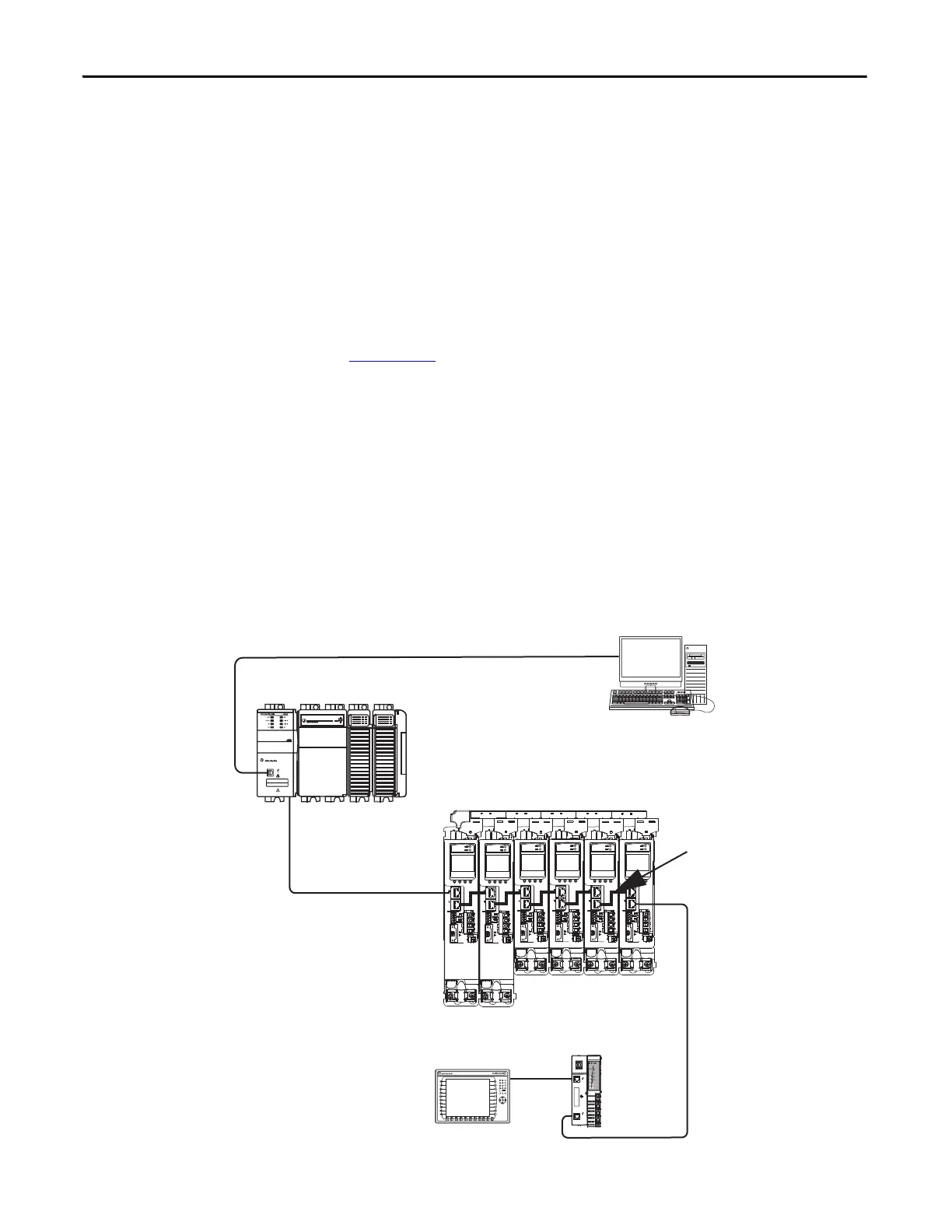
Linear Topology
In this example, all devices are connected in linear topology. The Kinetix 5500
drives include dual-port connectivity, however, if any device becomes
disconnected, all devices downstream of that device lose communication. Devices
without dual ports must include the 1783-ETAP module or be connected at the
end of the line.
Figure 6 - Kinetix 5500 Linear Communication Installation
1 (Front)
2 (Rear)
00:00:BC:2E:69:F6
02
0
1734-AENTR
Module
Status
Network
Activity
Network
Status
Point Bus
Status
System
Power
Field
Power
POINT I O
Link 1
Activity/
Status
Link 2
Activity/
Status
CompactLogix 5370 Controller
Logix Designer
Application
1585J-M8CBJM-x
Ethernet (shielded) Cable
1734-AENTR POINT I/O™
EtherNet/IP Adapter
CompactLogix Controller Programming Network
PanelView™ Plus
Display Terminal
1585J-M8CBJM-OM3
0.3 m (1.0 ft) Ethernet cable
for drive-to-drive connections.
Kinetix 5500 Servo Drive System

 Loading...
Loading...








