40 Rockwell Automation Publication 2198-UM001D-EN-P - May 2014
Chapter 2 Planning the Kinetix 5500 Drive System Installation
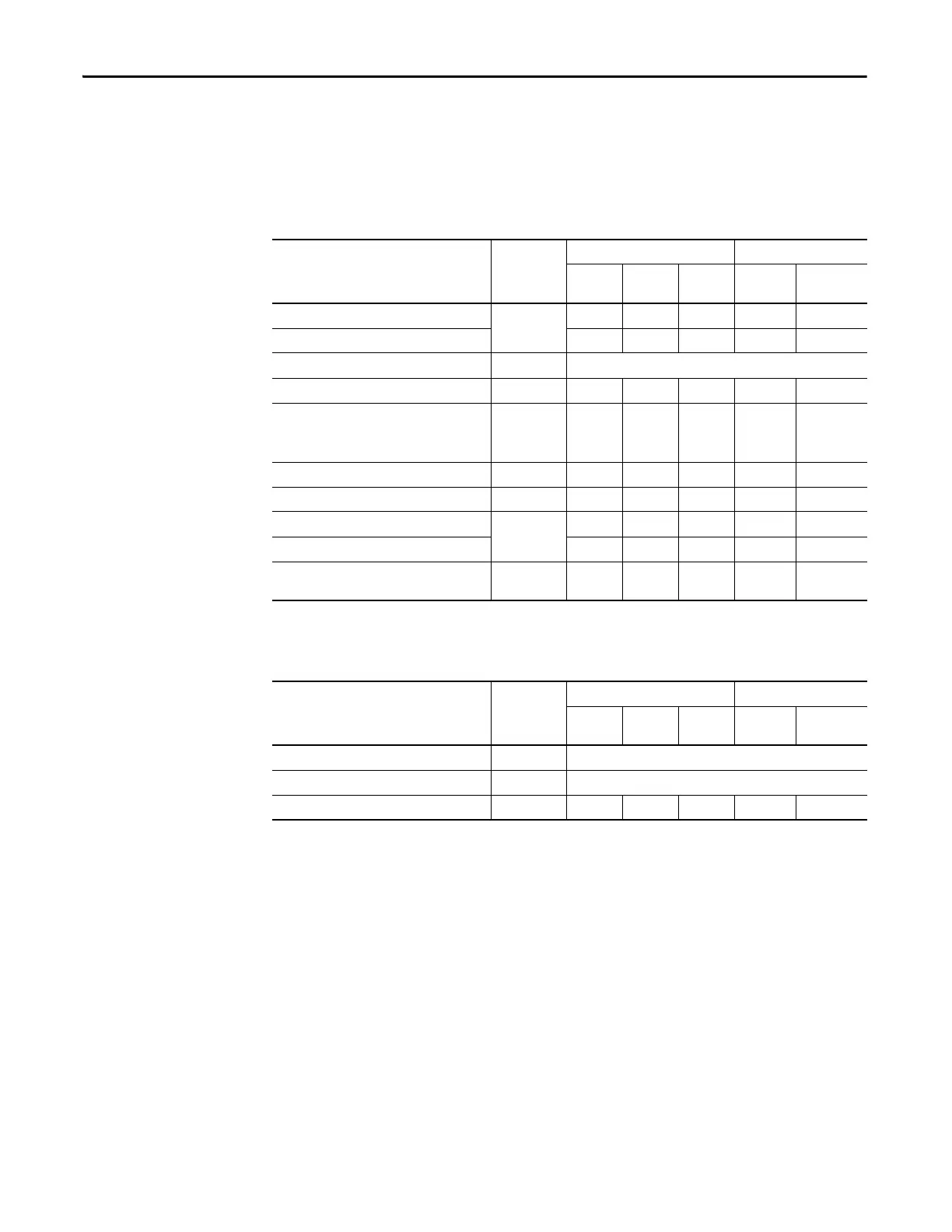
Cable Categories for Kinetix 5500 Systems
These tables indicate the zoning requirements of cables connecting to the
Kinetix 5500 drive components.
Table 15 - Kinetix 5500 Drive
Table 16 - Capacitor Module
Wire/Cable Connector
Zone Method
Very
Dirty
Dirty Clean
Ferrite
Sleeve
Shielded
Cable
L1, L2, L3 (shielded cable)
IPD
XX
L1, L2, L3 (unshielded cable) X
DC-/DC+ (DC bus) DC Bus-bar only, no wiring connector.
DC+/SH (shunt) RC X
U, V, W (motor power)
Motor feedback
(1)
Motor brake
MP
MF
BC
X
X
X
X
X
X
24V DC CP X
Safety enable for safe torque-off
(2)
STO X
Registration input, greater than 30 m (98.4 ft)
IOD
XX
Registration input, less than 30 m (98.4 ft) X
Ethernet
PORT1
PORT2
XX
(1) When the 2198-H2DCK converter kit is used, the feedback cable routes in the clean wireway.
(2) STO connector applies to only 2198-Hxxx-ERS (hardwired) servo drives.
Wire/Cable Connector
Zone Method
Very
Dirty
Dirty Clean
Ferrite
Sleeve
Shielded
Cable
DC-/DC+ (DC bus) DC Bus-bar only, no wiring connector.
24V DC CP Bus-bar only, no wiring connector.
Module status MS X

 Loading...
Loading...








