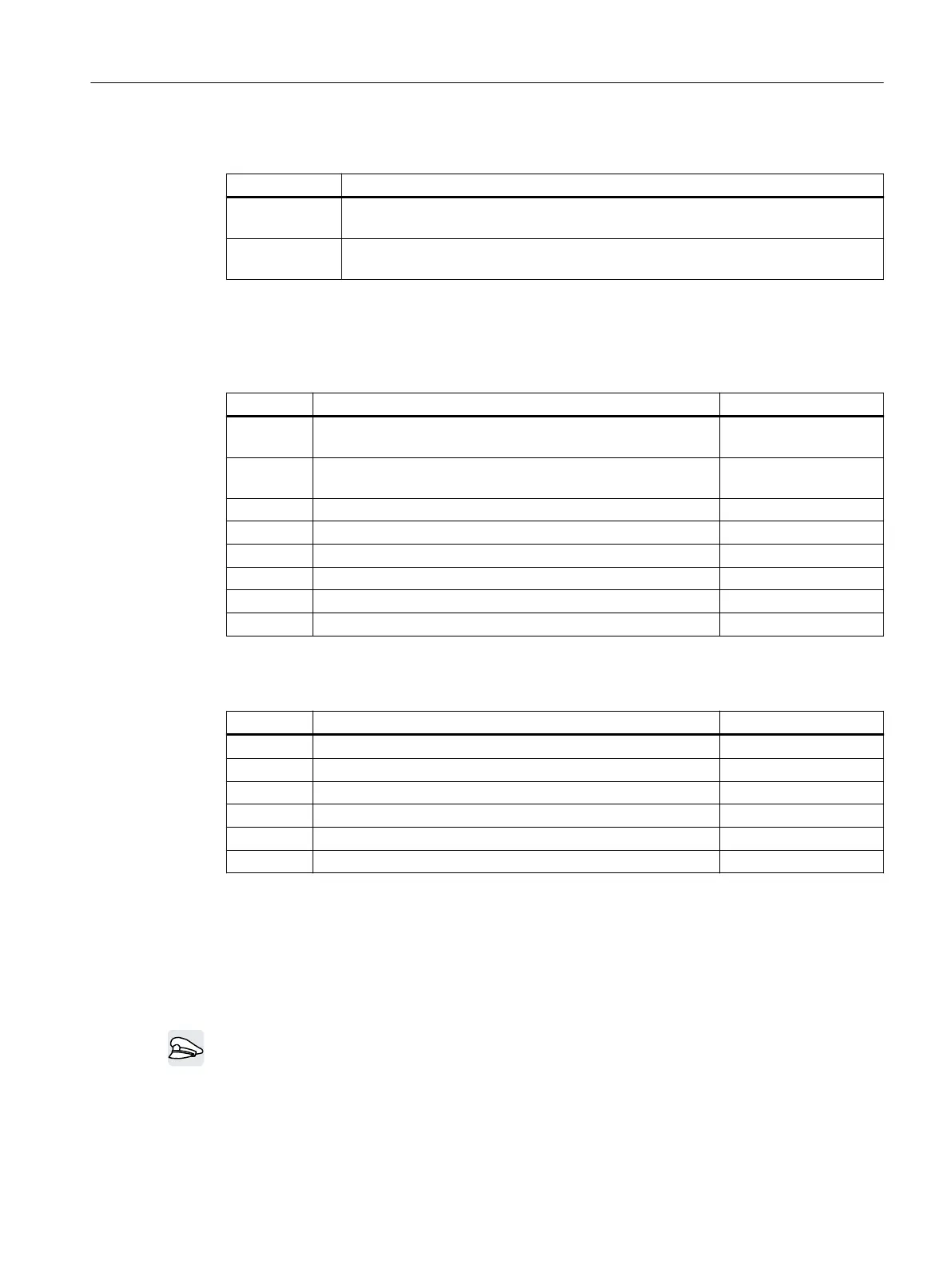
Example
Parameter Description
p0730 = 52.12 Signal source for terminal DO 0
Control motor holding brake via digital output0
p0731 = 52.12 Signal source for terminal DO 1
Control motor holding brake via digital output1
Parameter
Table 8-35 Control logic parameters of the motor holding brake
Parameter Description Factory setting
r0052.0…
15
CO/BO: Status word 1 -
r0056.0…
13
CO/BO: Status word, closed-loop control -
r0060 CO: Speed setpoint before the setpoint lter - rpm
p0730 BI: CU signal source for terminal DO 0 52.3
p0731 BI: CU signal source for terminal DO 1 52.7
p1215 Motor holding brake conguration 0
p1216 Motor holding brake opening time 100ms
p1217 Motor holding brake closing time 100ms
Table 8-36 Advanced settings
Parameter Description Factory setting
p0346[M] Motor excitation build-up time 0s
p0855[C] BI: Unconditionally open holding brake 0
p0858[C] BI: Unconditionally close holding brake 0
p1351[D] CO: Motor holding brake start frequency 0%
p1352[C] CI: Motor holding brake start frequency signal source 1351
p1475[C] CI: Speed controller torque setting value for motor holding brake 0
8.14 Free function blocks
Overview
The free function blocks permit congurable signal processing in the converter.
Advanced commissioning
8.14Free function blocks
SINAMICS G120C Converters
Operating Instructions, 02/2023, FW V4.7 SP14, A5E34263257B AK 249
 Loading...
Loading...







