196 Appendix: Safe Torque Off (STO)
Software monitoring of the STO function
The drive can be programmed using the Mint language. The software application Mint
WorkBench is available for configuring, programming and monitoring the status of the
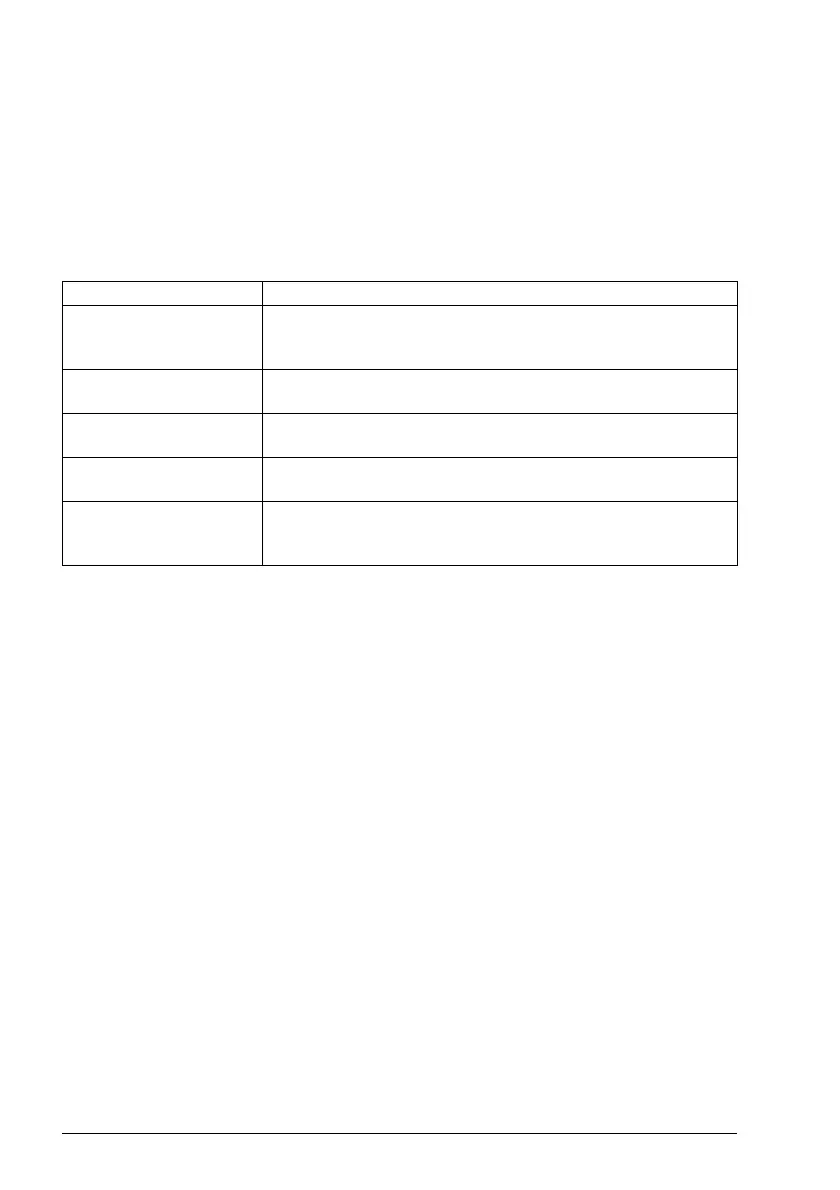
drive. The SAFETORQUEOFF Mint keyword can be used to report the status of the
STO hardware registers. SAFETORQUEOFF contains an array of values indicating the
states of the STO channel 1 and STO channel 2, the internal STO status output and
the internal STO fault latch. This array is described in the following table:
See the table in STO status indications on page 197 for a complete listing of
SAFETORQUEOFF values.
See Error messages generated by the drive on page 202, which describes the error
codes displayed by the drive.
Parameter Meaning
SAFETORQUEOFF(0)
The combined state of the two STO inputs:
STO1 = bit 0, STO2 = bit 1
0 = not powered, 1 = powered
SAFETORQUEOFF(1)
The state of STO1 input:
0 = not powered, 1 = powered
SAFETORQUEOFF(2)
The state of STO2 input:
0 = not powered, 1 = powered
SAFETORQUEOFF(6)
The state of the internal STO status output:
0 = fault, 1 = no fault
SAFETORQUEOFF(7)
The latch state of the internal STO status output:
0 = fault, latched, 1 = no fault, not latched
The latched value (0) can not be cleared until the drive is enabled.

 Loading...
Loading...



