Geometries with no orientation support
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018 109
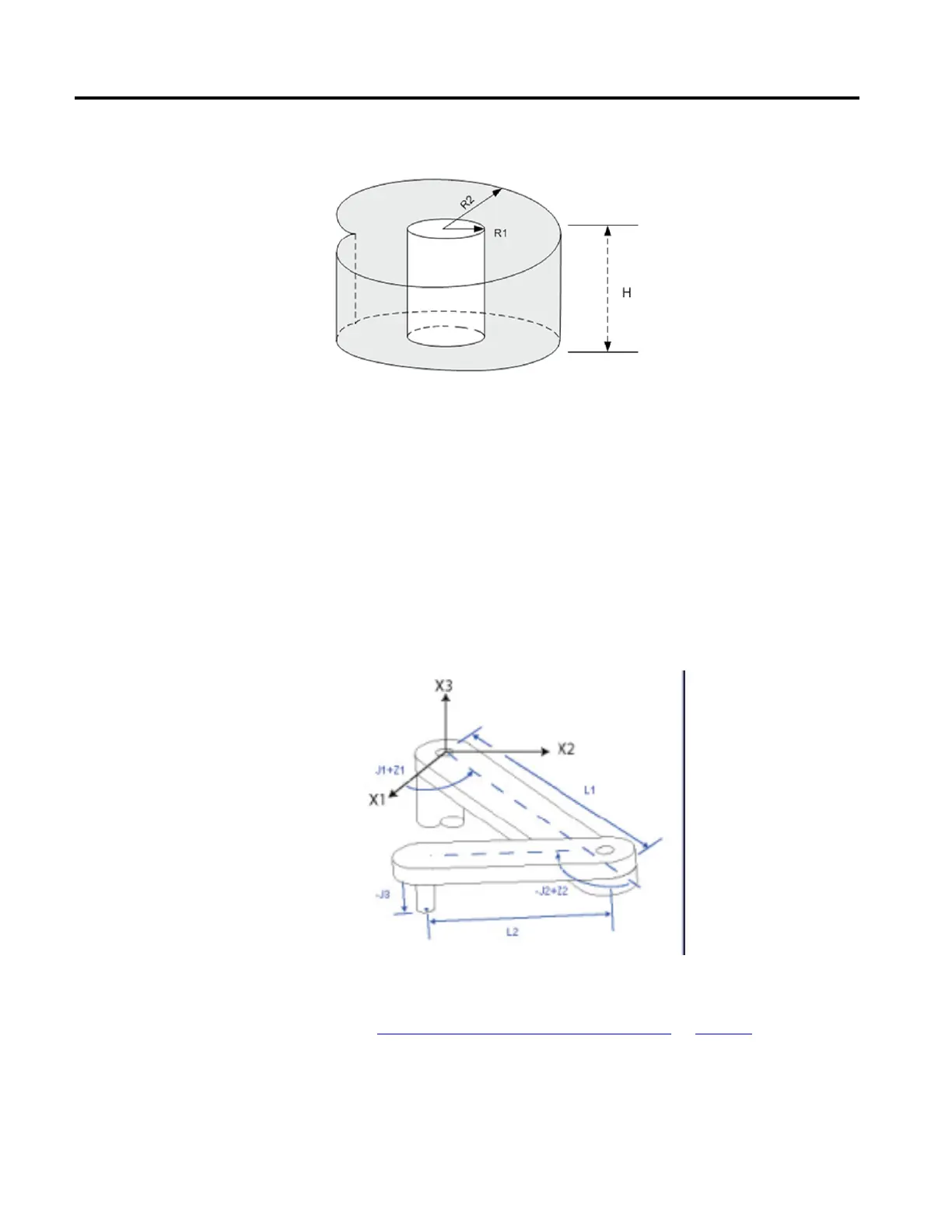
• An outer radius (R2) equal to |L1+L2|.
Configure the Logix Designer application to control robots with varying reach
and payload capacities. The configuration parameter values for the robot include:
• Link lengths
The configuration parameter information is available from the robot
manufacturer.
Tip: Base offsets and end-effector offsets do not apply to a SCARA Independent robot.
The following example illustrates the typical configuration parameters for a
SCARA Independent robot.
See also
Link Lengths for SCARA Independent robot on page 110
Link lengths are the rigid mechanical bodies attached at joints.
parameters for a SCARA
Independent robot
Independent robot
 Loading...
Loading...

