Geometries with orientation support
134 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
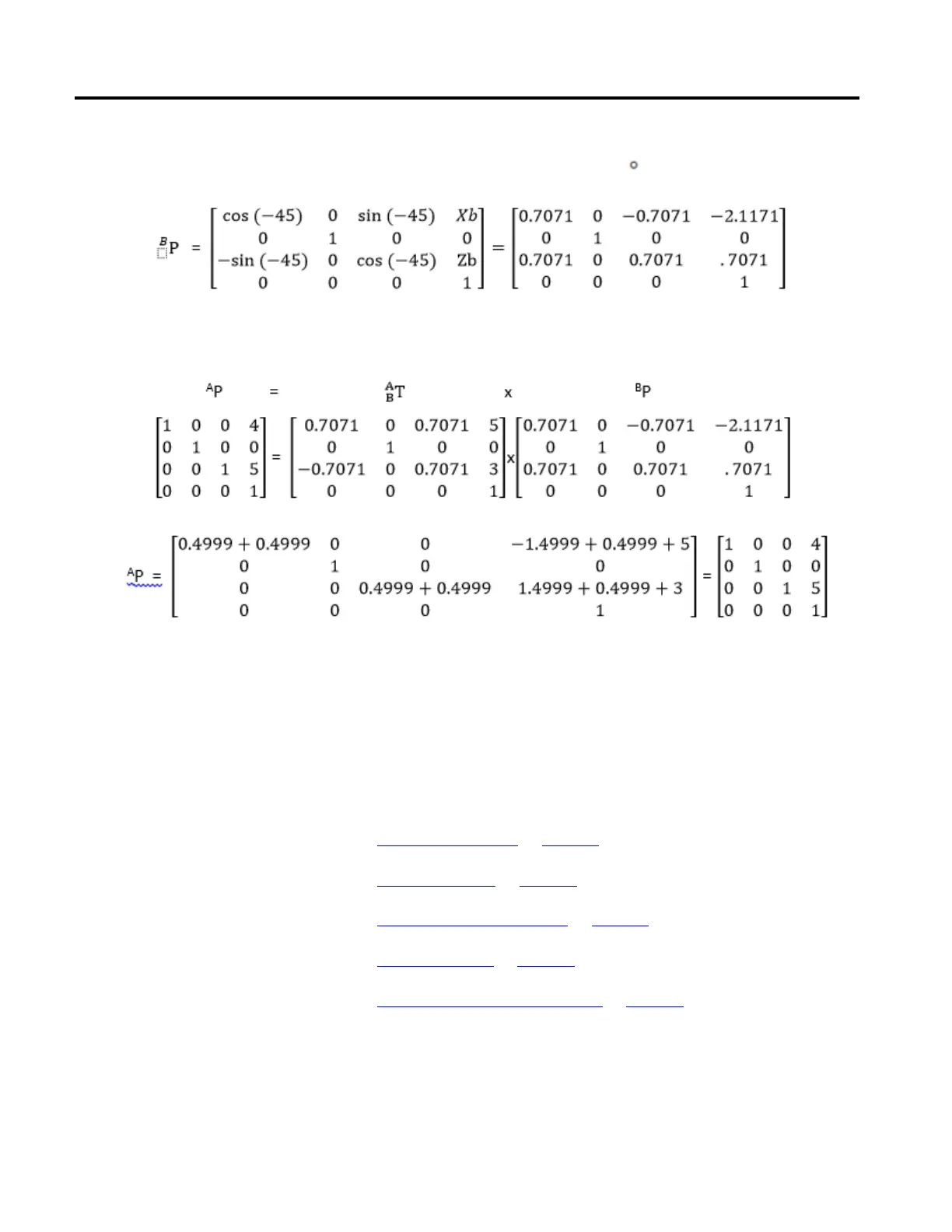
The point
B
P is with respect to coordinate frame {B} with the translation vector 0f
[-2.1171 0 .7071]
T
and rotation matrix of -45 rotation.
The point
B
P is also specified in user format with X = -2.1171, Y = 0, Z = 0.7071,
Rx = 0, Ry = 0, Rz = -45.
Use the matrix representation to convert points from one frame to another frame.
It enables computation of the right translation and orientation or pose in the
specified frame.
For further information on the methods to determine the point specifications in
the example, see the work frame and tool frame topics.
See also
Work Frame example on page 139
Tool frame offsets on page 142
Cartesian Point Specification on page 116
Point Conversion on page 125
RxRyRz, flip, mirror flip condition on page 126
Studio 5000 kinematics supports these frames for programming different robot
applications. Forward and Inverse transformation equations are established for a
Cartesian point in space based on frames indicated by the program.
frames
 Loading...
Loading...

