Geometries with no orientation support
110 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
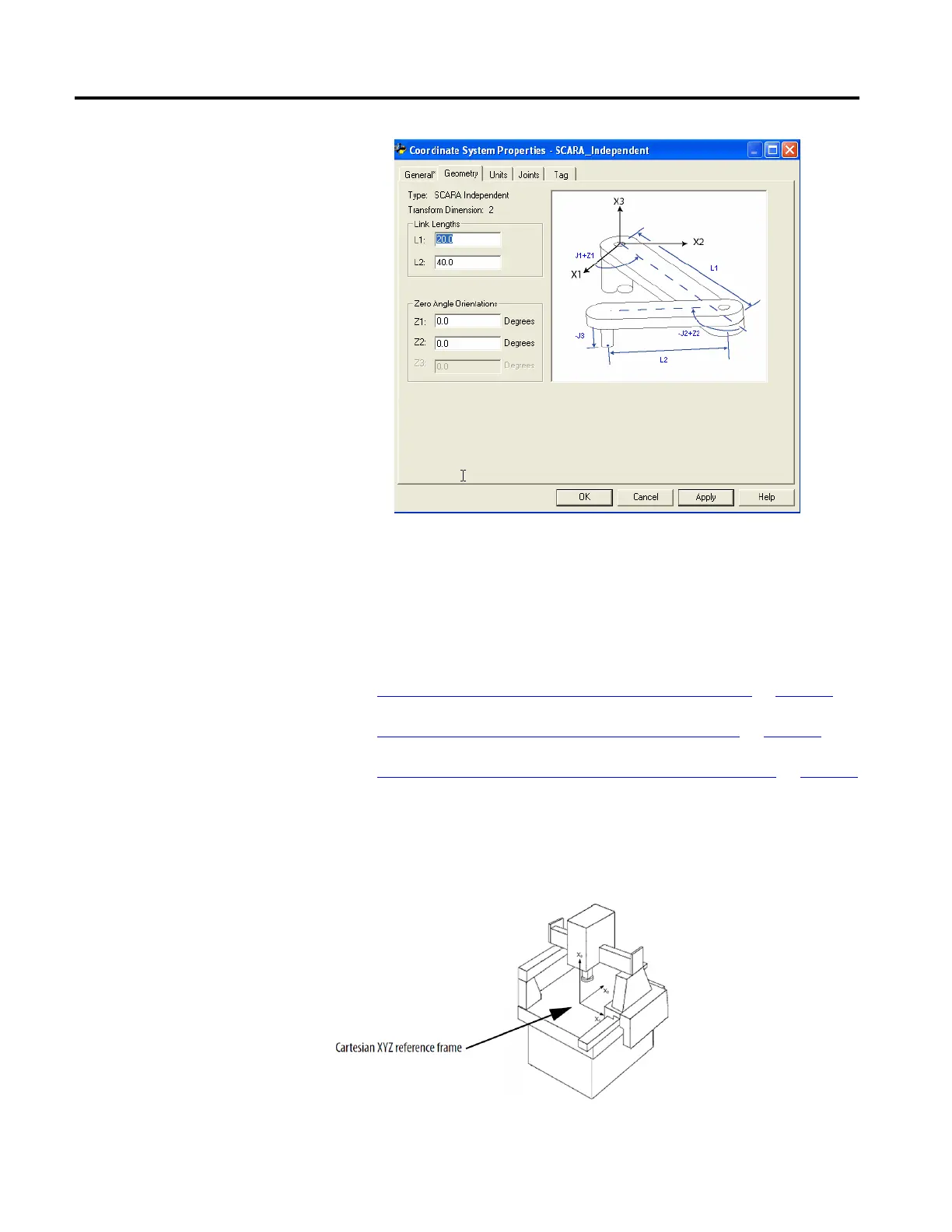
Type the Link Lengths values.
For the robot shown in SCARA Independent, the Link
Length values are:
• L1 = 20
• L2 = 40
Base offsets and end-effector offsets do not apply to a SCARA Independent robot
configuration.
Use these guidelines when configuring a Cartesian Gantry robot.
See also
Establish the reference frame for a Cartesian Gantry robot on page 111
Identify the work envelope for a Cartesian Gantry robot on page 111
Define configuration parameters for a Cartesian Gantry robot on page 111
For a Cartesian Gantry robot, the reference frame is an orthogonal set of X1, X2,
and X3 axes positioned anywhere on the Cartesian robot. All global coordinate
measurements (points) are relative to this reference frame. Typically, the reference
frame is aligned with the X1, X2, and X3 axes of the machine.
Gantry robot
Establish the reference frame
for a Cartesian Gantry robot
 Loading...
Loading...

