Geometries with no orientation support
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018 75
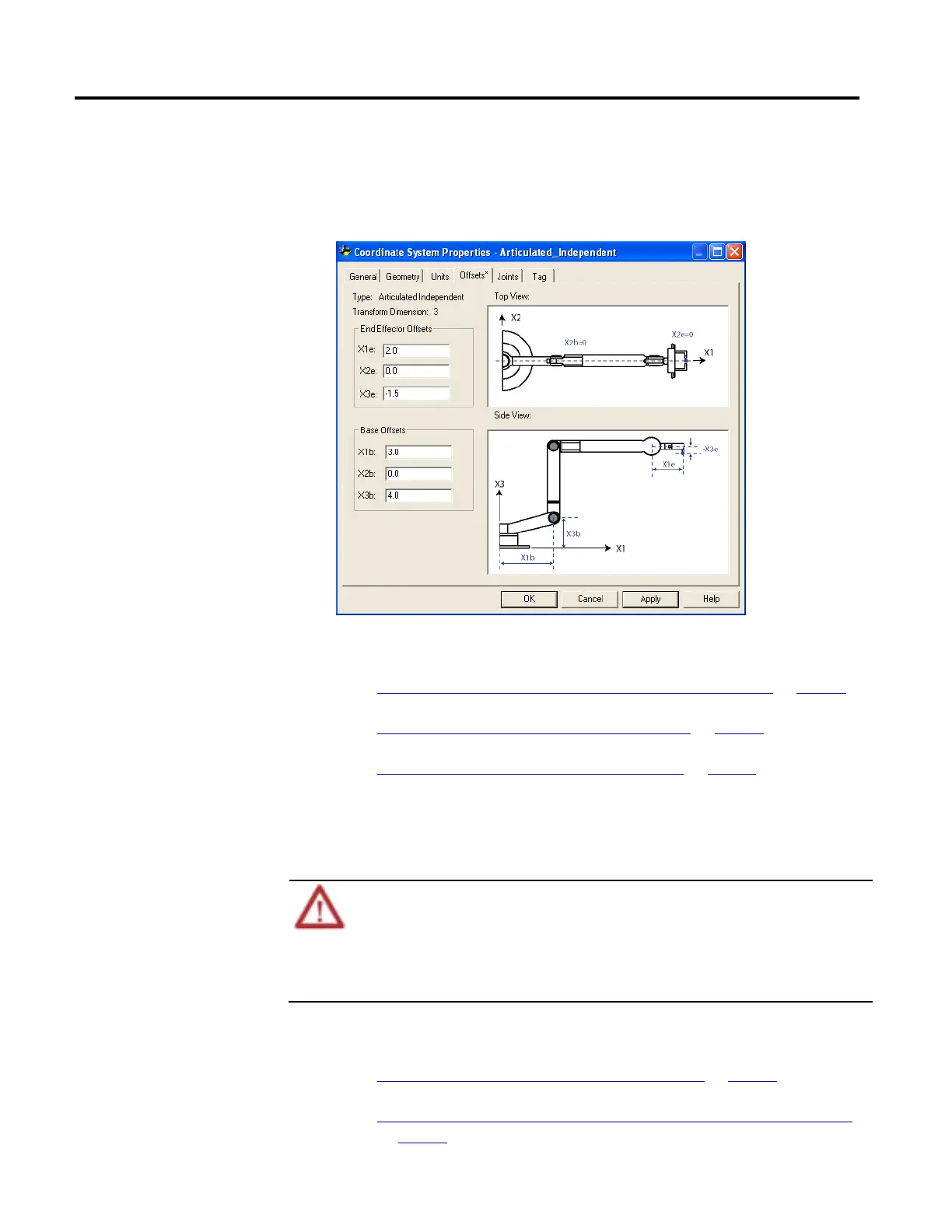
Some robots also have an offset defined for the J3 joint. Account for this value
when computing the X3e end effector offset value. If the value for X3e offset is
entered as the sum of X3e1+X3e2 (-3+1.5 = -1.5), the configured value for X3e
is -1.5.
See also
Configuration parameters for Articulated Independent robot on page 71
Link Lengths for Articulated Independent robot on page 72
Base Offsets for Articulated Independent robot on page 73
The Articulated dependent robot contains motors for the elbow and the shoulder
at the base of the robot. The dependent link controls J3 at the elbow. Follow these
guidelines when configuring an Articulated Dependent robot.
Before turning ON the Transform and/or establishing the reference frame, do the following for the joints of the target
coordinate system:
• Set and enable the soft travel limits.
• Enable the hard travel limits.
Failure to perform these steps can cause robotic arm to move to unexpected positions causing machine damage and/or
injury or death to personnel.
See also
Reference frame for Articulated Dependent robots on page 76
Methods to establish a reference frame for an articulated dependent robot
on page 78
Dependent robot
 Loading...
Loading...

