Geometries with no orientation support
92 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
To avoid issues with singularity positions, the MCT instruction internally
calculates the joint limits for the Delta robot geometries. When an MCT
instruction is invoked for the first time, the maximum positive and maximum
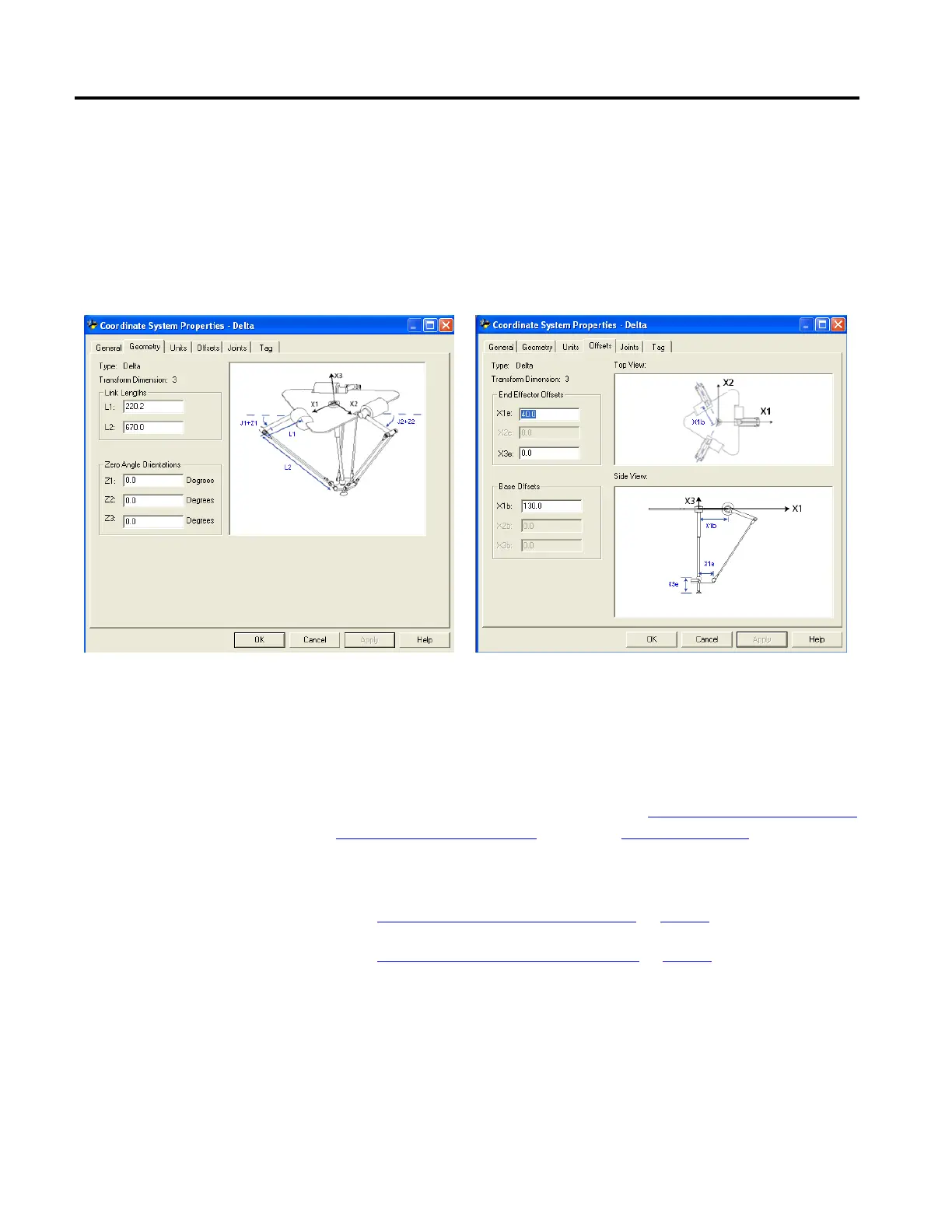
negative joint limits are internally calculated based upon the link lengths and
offset values entered on the Geometry and Offsets tabs in the Coordinate
System Properties dialog box.
Delta three-dimensional Configuration Systems Properties dialog box - Geometry and Offsets tabs
During each scan, the joint positions in the forward and inverse kinematics
routines are checked to ensure that they are within the maximum and minimum
negative joint limits.
Homing or moving a joint axis to a position beyond a computed joint limit and
invoking a MCT instruction results in an error 67 (Invalid Transform position).
For more information regarding error codes, see
Logix 5000 Controllers Motion
Instructions Reference Manual, publication MOTION-RM002.
See also
Maximum positive joint limit condition on page 92
Maximum negative joint limit condition on page 93
The derivations for the maximum positive joint applies to the condition when L1
and L2 are collinear.
Maximum positive joint limit
condition
 Loading...
Loading...

