Geometries with no orientation support
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018 91
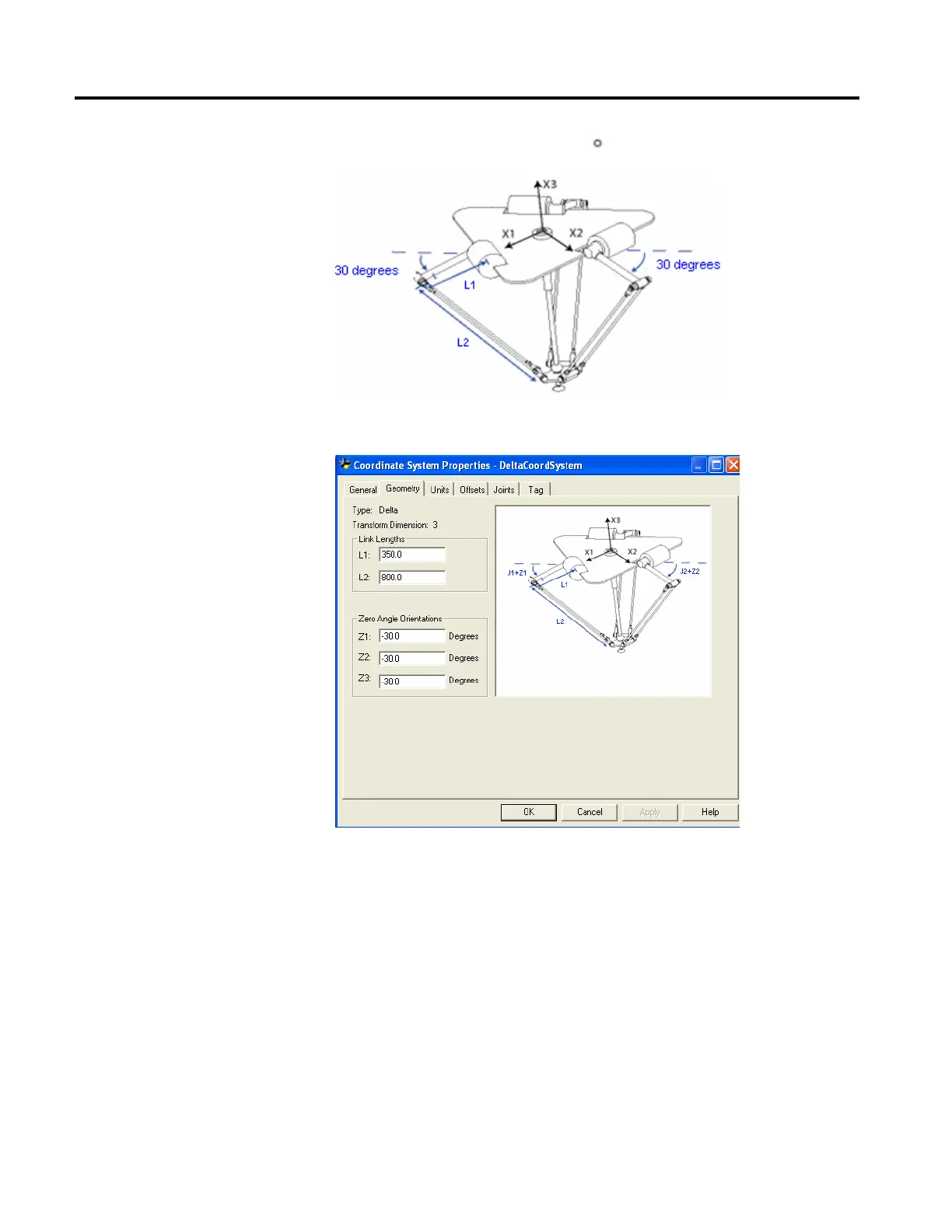
Delta Robot with Joints Homed at 30
Configuring Delta robot Zero Angle orientation
The work envelope is the three-dimensional region of space that defines the
reaching boundaries for the robot arm. The typical work envelope for a Delta
robot looks similar to plane in the upper region, with sides similar to a hexagonal
prism and the lower portion similar to a sphere. For more information regarding
the work envelope of Delta three-dimensional robots, see the documentation
provided by the robot manufacturer.
Program the robot within a rectangular solid defined inside the robot's work zone.
The rectangular solid is defined by the positive and negative dimensions of the
X1, X2, X3 virtual source axes. Be sure that the robot position does not go outside
the rectangular solid. Check the position in the event task.
Identify the work envelope for
a Delta Three-dimensional
robot
 Loading...
Loading...

