Geometries with orientation support
186 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
See also
Coupling between J4 J5 axis on page 186
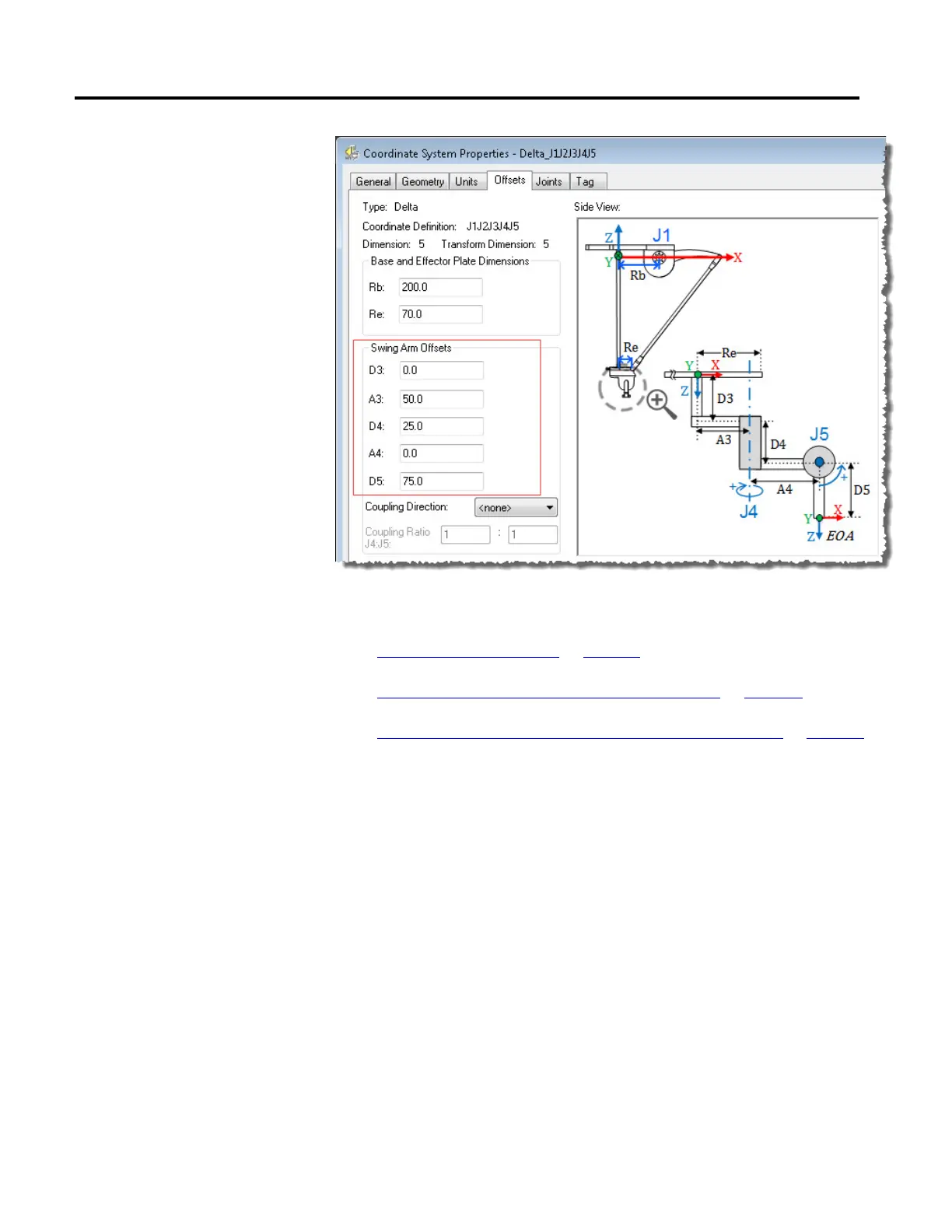
Configuration parameters for Delta J1J2J3J4J5 robot on page 180
Configure Zero Angle Orientations for Delta J1J2J3J4J5 robot on page 188
Some five dimensional Delta robots have a mechanical coupling between the J4
and J5 axis. Rotation of the Swing Arm causes the tilt movement on D5 offset
link. To compensate for this tilt motion, move the J5 axis in the same or opposite
direction of the J4 axis move with relative gear ratio.
Coupling between J4 and J5 axis
 Loading...
Loading...

