Geometries with no orientation support
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018 73
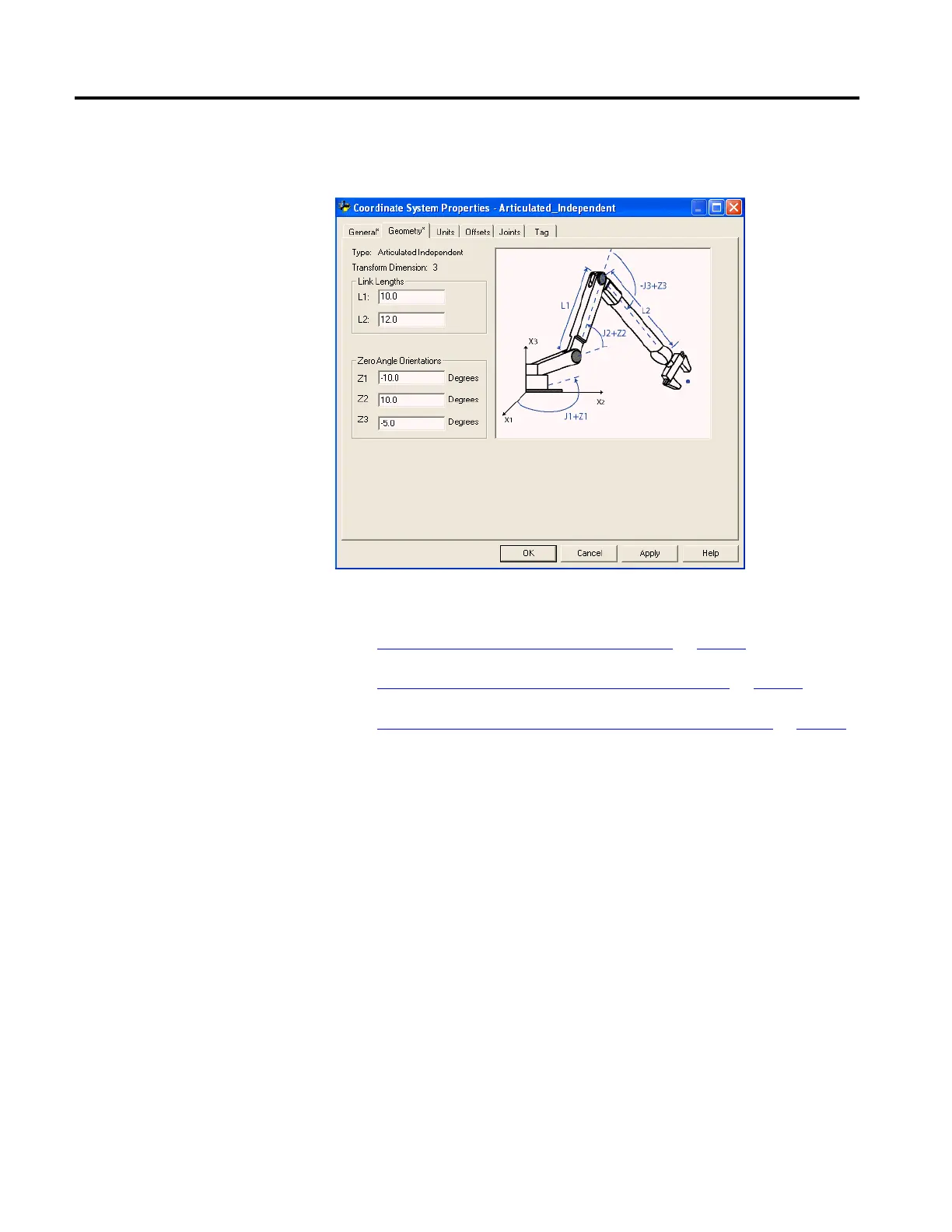
Enter the link lengths on the Geometry tab in the Coordinate System
Properties dialog box.
See also
Base offset for Articulated Independent robot on page 73
End effector offsets for Articulated Independent robot on page 74
Configuration parameters for Articulated Independent robot on page 71
The base offset is a set of coordinate values that redefines the origin of the robot.
The correct base-offset values are typically available from the robot manufacturer.
Type the values for the Base Offsets in the X1b and X3b boxes on the Geometry
tab in the Coordinate System Properties dialog box.
Base offsets for Articulated
Independent robot
 Loading...
Loading...

