Geometries with orientation support
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018 175
through the ToolFrame parameter in the MCTO and MCTPO
instructions.
See also
Identify the Work Envelope for Delta J1J2J3J6 robot on page 172
To use the Kinematic sample project on configuring a Delta J1J2J3J6 Delta robot,
on the Help menu, click Vendor Sample Projects and then click the Motion
category.
The Rockwell Automation sample project's default location is:
c:\Users\Public\Public Documents\Studio
5000\Sample\ENU\v<current_release>\Rockwell Automation
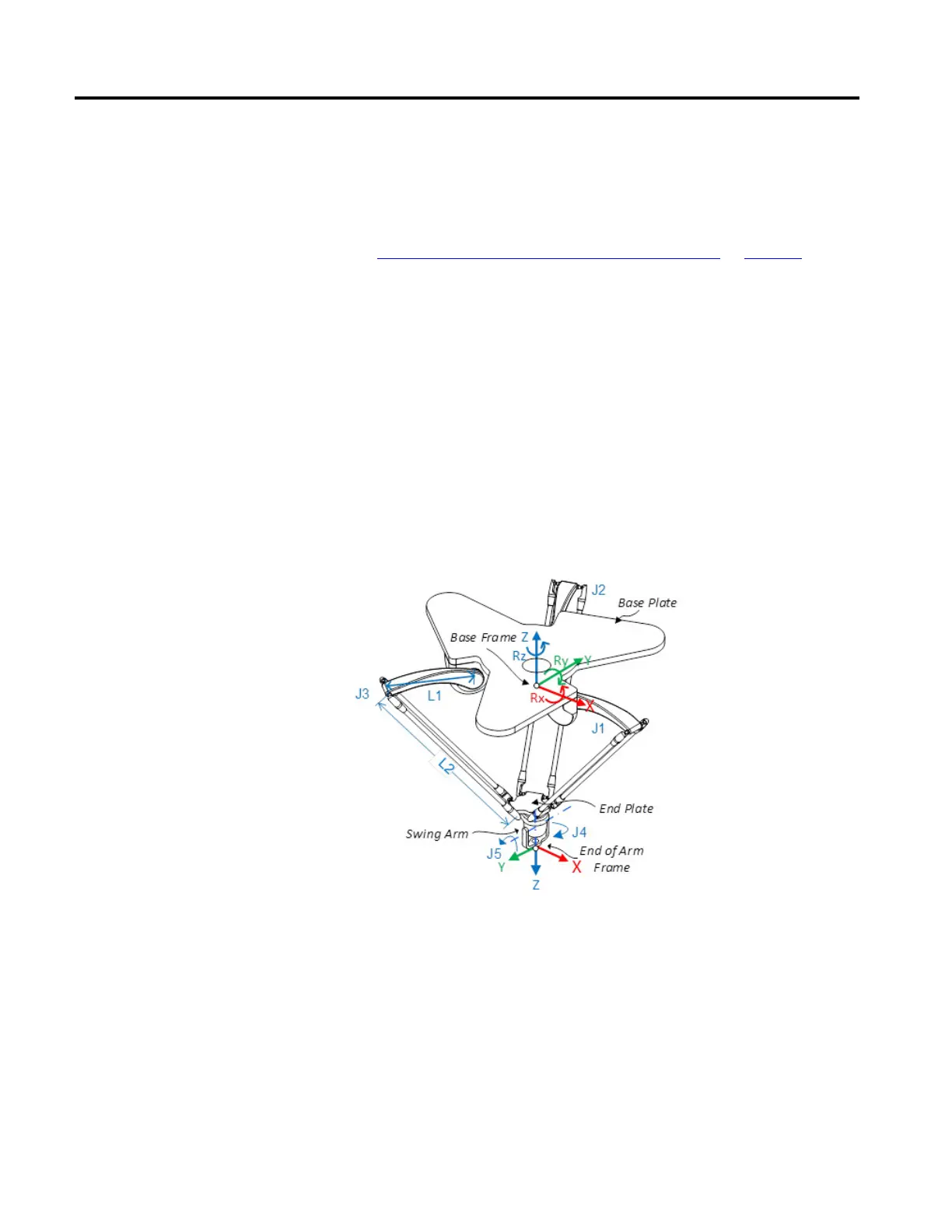
This illustration shows a five-axis Delta robot that moves in six-dimensional
Cartesian (X, Y, Z, Rx, Ry, Rz) space. It is often called a spider or umbrella robot.
In the Logix Designer application, the five-degrees of freedom are configured as
five joint axes (J1, J2, J3, J4, J5) in the robots coordinate system. The five joint axes
are either:
• Directly programmed in joint space.
• Automatically controlled by the embedded Kinematics software in the
application from instructions programmed in a virtual Cartesian coordinate
system.
J1J2J3J6 robot
J1J2J3J4J5 Coordinate
System
 Loading...
Loading...

