Geometries with no orientation support
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018 71
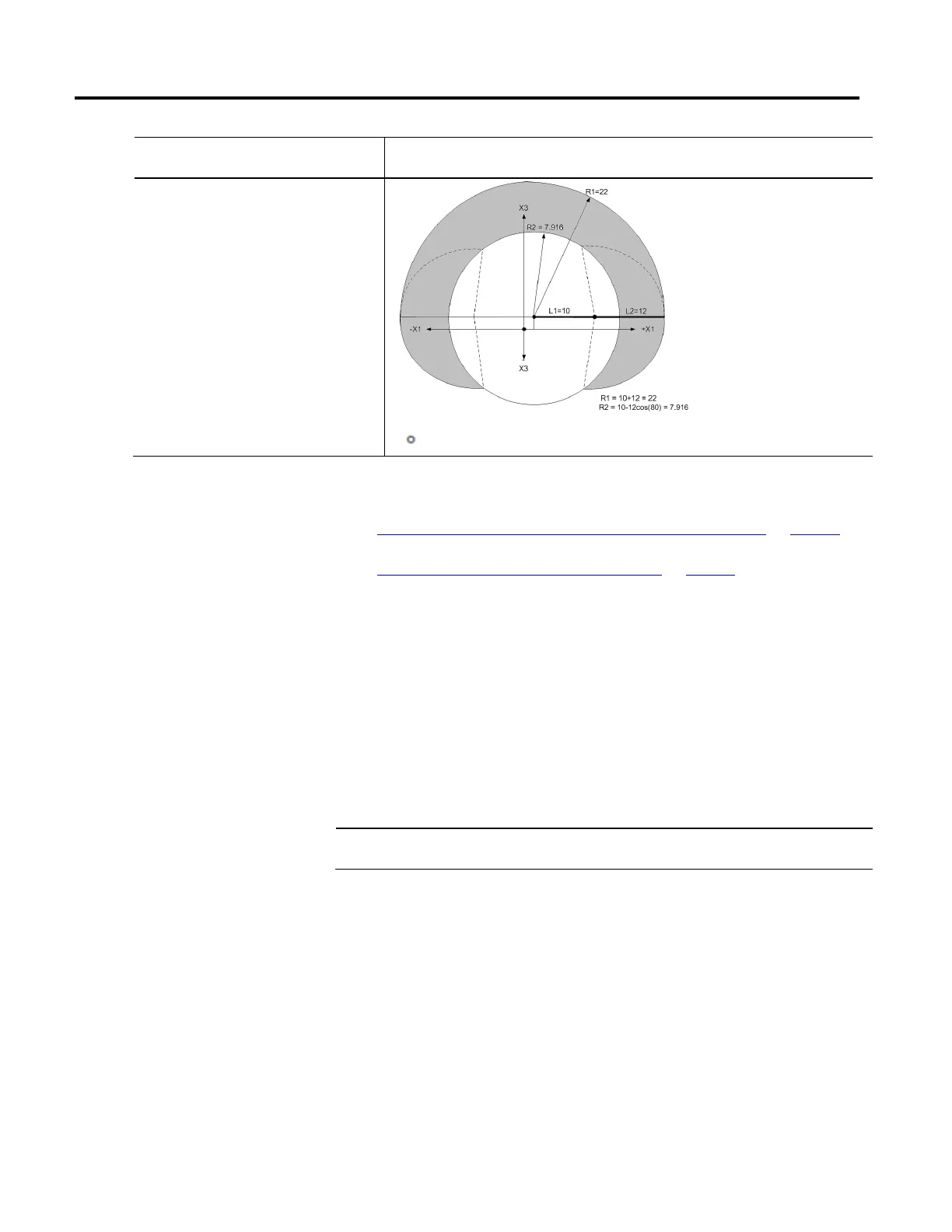
If the range-of-motion values for the articulated
robot are:
Typically, the work envelope is:
Side view -
Depicts the envelope of the tool center point sweep in J2 and J3 while J1 remains at a fixed position
of 0 .
See also
Configuration parameters for articulated independent robot on page 71
Configure an articulated independent robot on page 65
Configure the Logix Designer application to control robots with varying reach
and payload capacities. The configuration parameter values for the robot include:
• Link lengths
• Base offset
• End effector offsets
The configuration parameter information is available from the robot
manufacturer.
Important: Verify that the values for the Link Lengths, Base Offsets, and End-Effector Offsets are entered in
the Coordinate System Properties dialog box using the same measurement units.
This example illustrates the typical configuration parameters for an Articulated
Independent robot.
Configuration parameters for
Articulated Independent robot
 Loading...
Loading...

