Geometries with orientation support
174 Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018
Maximum J6 joint limit condition
The J6 axis is the rotational axis that could have multiple turns. The maximum
number of turns supported is +/-127. Maximum positive and negative range is
checked based on number of turns supported on J6.
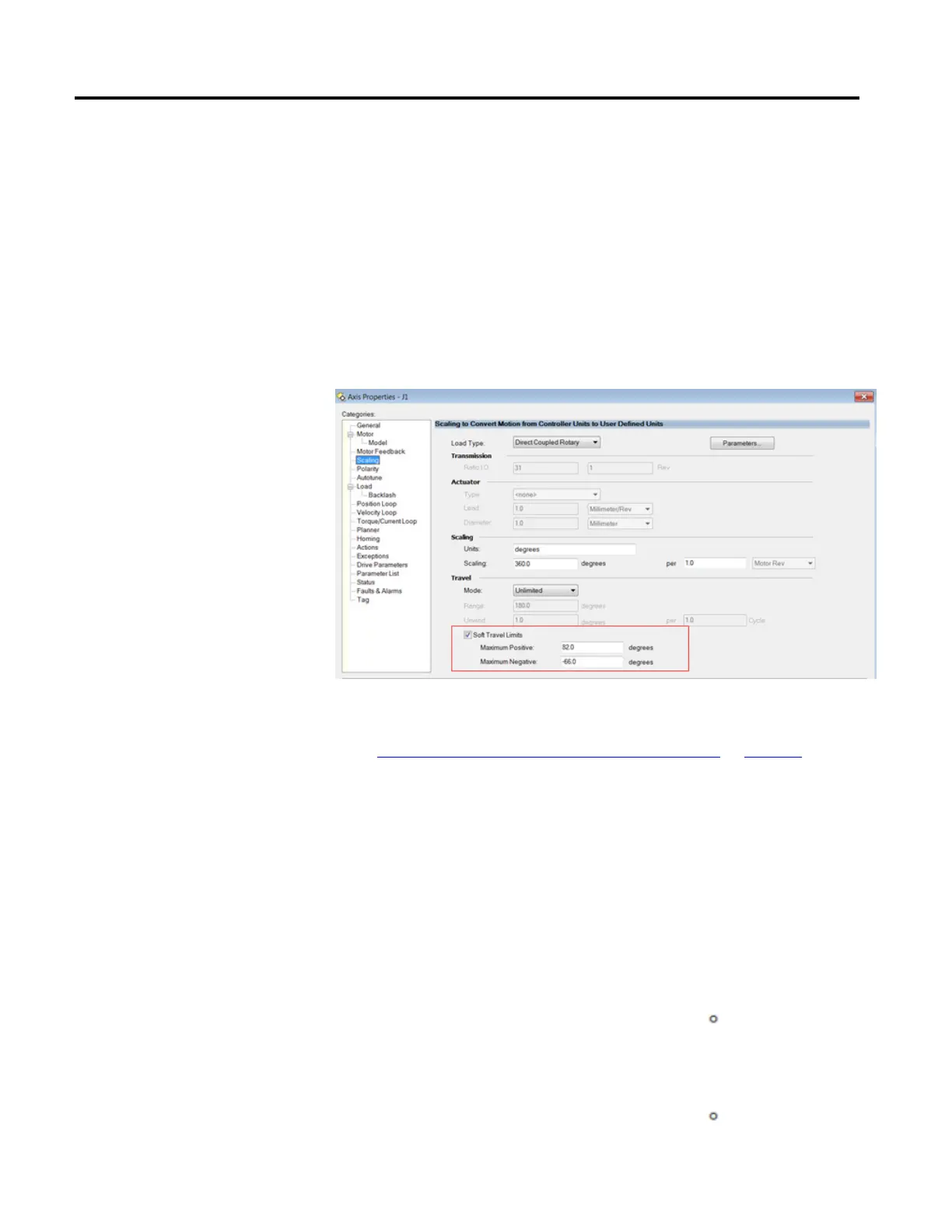
Configure the joint limits
Refer to robot manufacturer's data sheet to compute the range of J1, J2, J3, and J6
axes. These limits are set as a Soft Travel Limit on the Scaling tab in the Axis
Properties dialog box.
See also
Identify the Work Envelope for Delta J1J2J3J6 robot on page 172
The work envelope for the 4-axis Delta robot relies on the Work and Tool Frame
offset values defined in the MCTO and MCTPO instruction. The target end
position range changes based on the Work and Tool Frame offsets.
In the Delta robot, the End plate is always parallel to the Base plate and the 4-axis
Delta robot can reach only up to limited orientation positions. Work and Tool
frame offset values are limited up to reachable work envelope. The following offset
values are allowed for Work and Tool frames. The MCTO and MCTPO
instructions generates error 148 for invalid offset values.
• Offset values on X, Y, Z and Rz axis are allowed for the Work Frame offsets.
Rx and Ry offsets are restricted and must be set to 0 . Specify these offsets
through the WorkFrame parameter in the MCTO and MCTPO
instructions.
• Offset values on X, Y, Z and Rz axis are allowed for the Tool Frame offsets.
Rx and Ry offsets are restricted and must be set to 0
. Specify these offsets
Work and Tool Frame offset
limits for Delta J1J2J3J6 robot
 Loading...
Loading...

