Cartesian coordinate system
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018 45
See also
Termination types on page 55
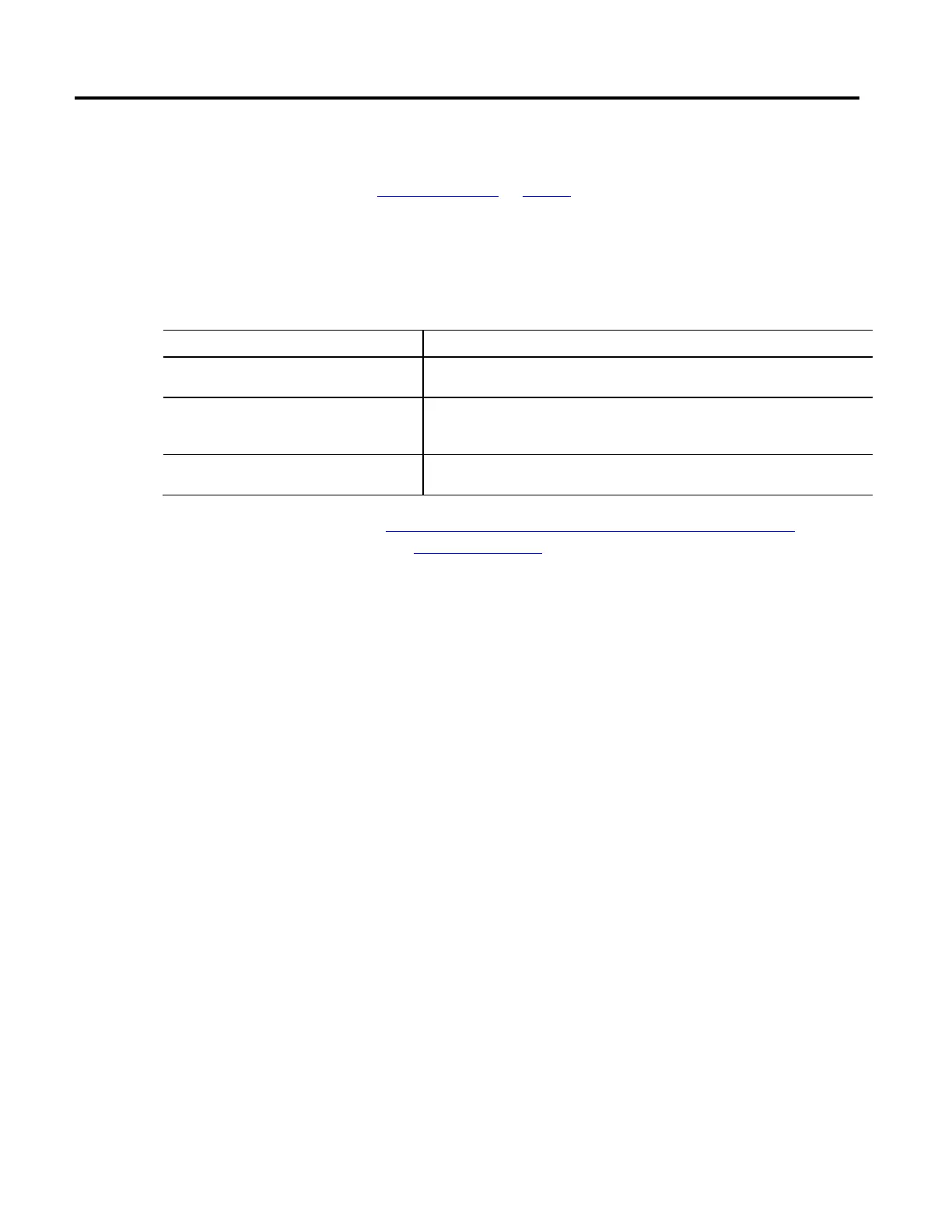
Use these multi-axis coordinated motion instructions to program Cartesian
moves on robots with orientation control.
Instruction Description
Motion Coordinated Path Move (MCPM)
Use the MCPM instruction to start a multi-dimensional coordinated path move for the specified
Primary axes (X, Y, Z) and orientation axes (Rx, Ry, Rz) of a Cartesian coordinate system.
Motion Coordinated Transform with Orientation (MCTO)
Use the MCTO instruction to establish a bidirectional transform that is set up between a Cartesian and
a robot systems with coordinates that are joint axes of a robot. The XYZ translation coordinates and the
RxRyRz orientation coordinates in the fixed angle convention define the Cartesian coordinates.
Motion Calculate Transform Position with Orientation
(MCTPO)
Use the MCTPO instruction to calculate the position of a point in one coordinate system to the
equivalent point in a second coordinate system.
See the Logix 5000 Motion Controllers Instructions Reference Manual,
publication MOTION-RM002, for more information about the MCPM,
MCTO, and MCTPO instructions.
The MCPM instruction supports blending two or more moves together.
Tip:
Be sure to review the command tolerance termination type blending for MCLM and
MCCM to understand the fundamentals of blending.
Program coordinate system
with orientation
Blending Path Moves with
MCPM
 Loading...
Loading...

