Geometries with orientation support
Rockwell Automation Publication MOTION-UM002F-EN-P - February 2018 197
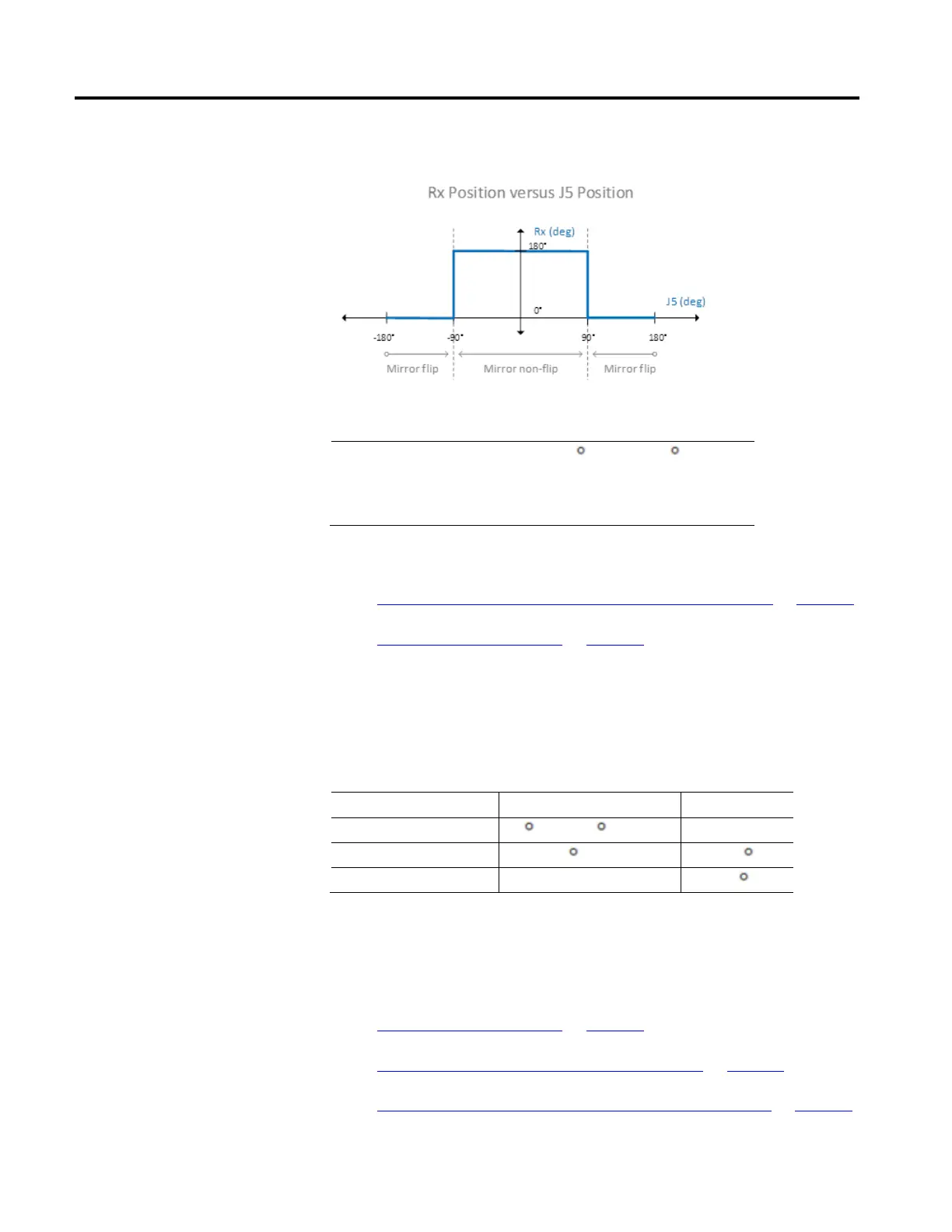
This is shown graphically as follows.
Important:
Per Euler angle convention, -180.0
is equal to +180.0 and is also a
valid Rx position in the mirror non-flip region. However, due to limitations
imposed to support J4 turns counter, this value is not permitted for use in
specifying Rx position.
See also
Rz axis position in the mirror non-flip and mirror flip regions on page 197
Mirror image Ry orientation on page 196
Robot geometries that exhibit the mirror image Ry position behavior have an
impact on the Rz position depending on which region the Ry axis is operating.
This relationship is shown in the following table.
Region J4 range Rz position
mirror non-flip
-180
<= J4 < 180
-(J4)
mirror flip
0 <= J4 < 180
-(J4) + 180.0
mirror flip -180° <= J4 < 0
-(J4) - 180.0
Tip: The Rz flip in position does not result in any motion on the J4 axis.
See also
Mirror image Ry orientation on page 196
Rx axis position in mirror non-flip and flip regions on page 196
Example of mirror image and flip behavior on Rx and Rz axes on page 198
Rz axis position in mirror
non-flip and mirror flip regions
 Loading...
Loading...

