275
5
26
3213
xyz
xy
yz
++=
−=−
+=
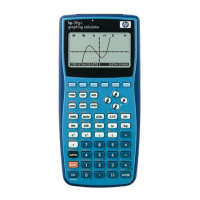
This gives the final result shown in the matrix
M2 on the right, giving a solution of (1, -2, 3).
The huge advantage of this function is that it
allows for inconsistent matrices which can’t be
solved by an inverse matrix.
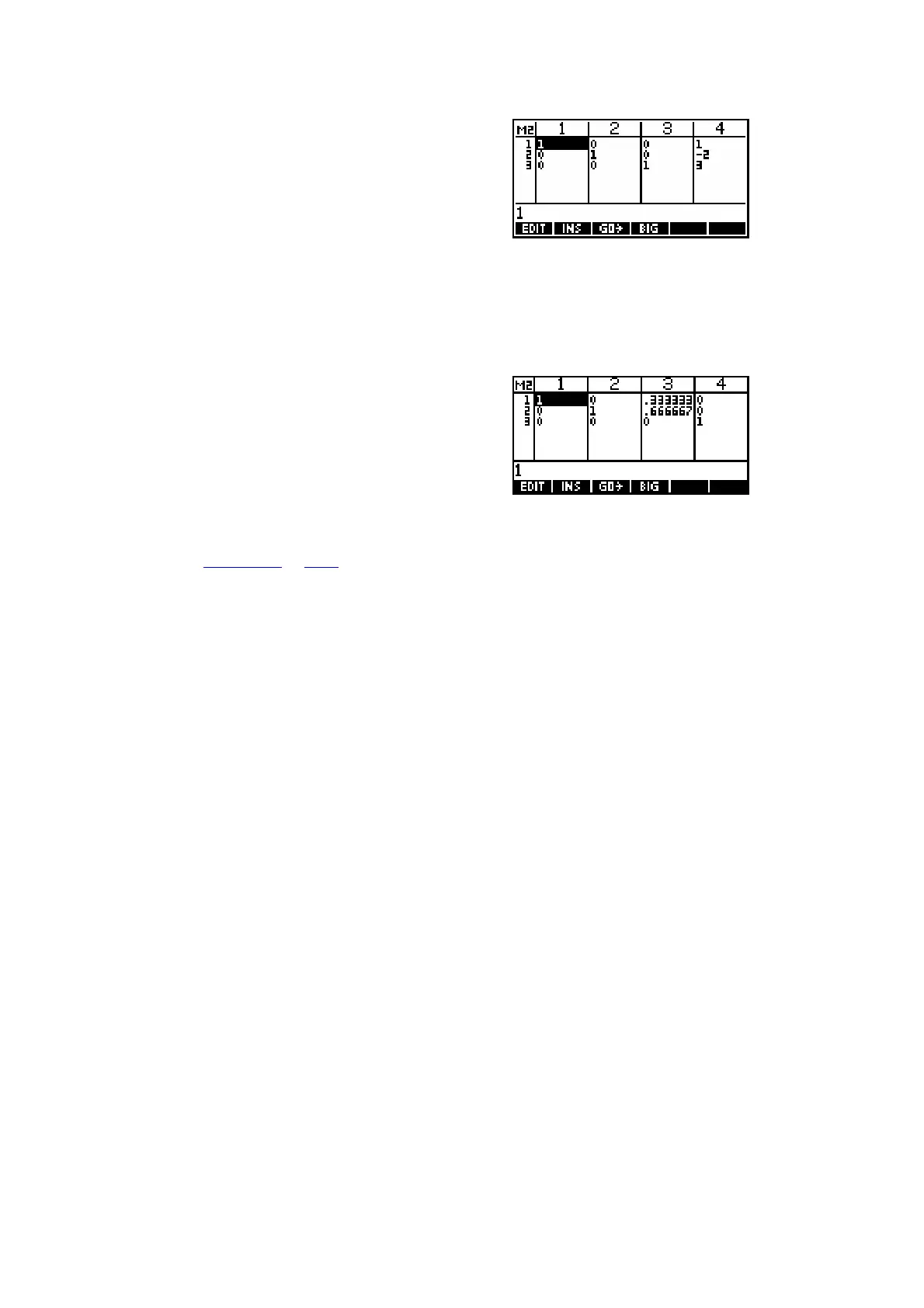
For example, suppose we use the system of equations below, in which the
third equation is a linear combination of the first two but the constant is not
consistent with this - ie no solution.
If we solve this in the
same way as before, the
matrix which results is:
The final line of 0 0 0 1 indicates no solution.
See also: INVERSE, DET
SCHUR
See User’s manual
SIZE
See User’s manual
SPECNORM
See User’s manual
SPECRAD
See User’s manual
SVD
See User’s manual
SVL
See User’s manual
 Loading...
Loading...