Goodrive270 series VFD for fan and pump Basic operation guidelines
-125-
Present step of simple PLC
Used to display the present
step of the simple PLC function.
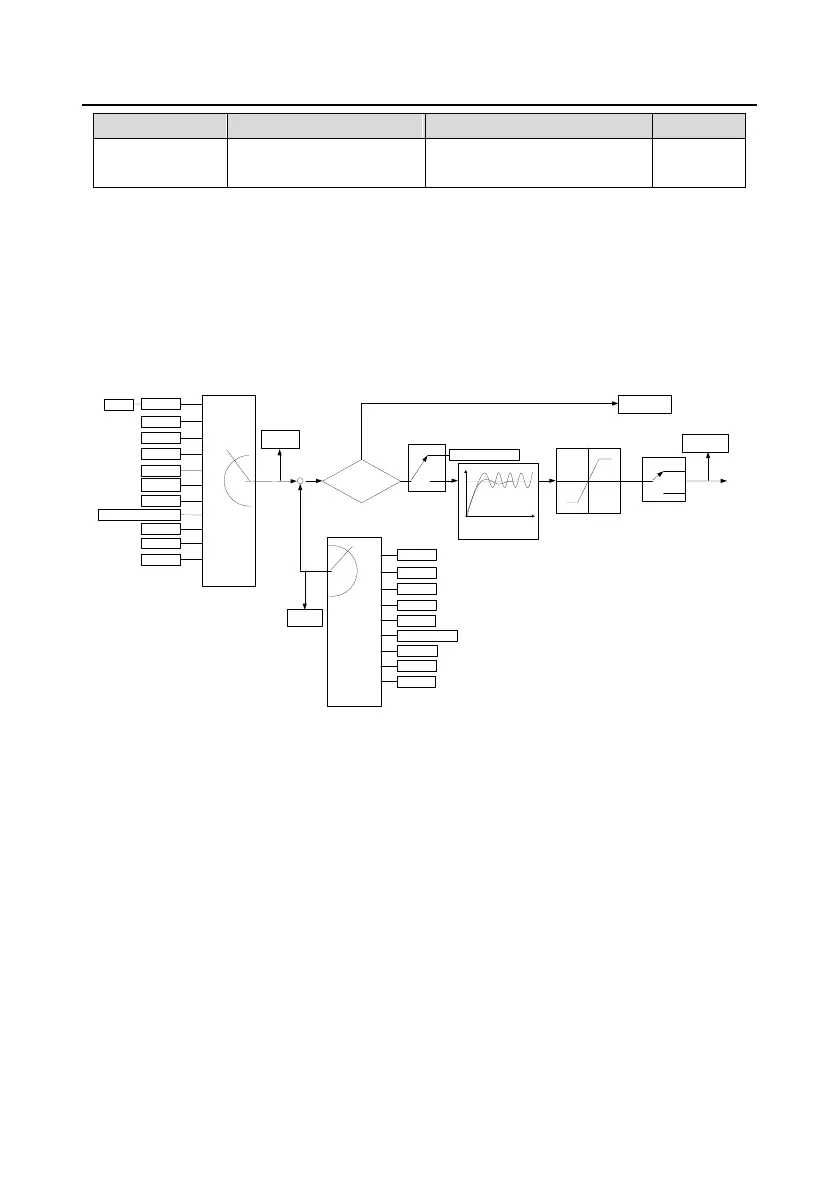
5.5.15 PID control
PID control, a common mode for process control, is mainly used to adjust the VFD output frequency
or output voltage by performing scale-division, integral and differential operations on the difference
between feedback signal of controlled variables and signal of the target, thus forming a negative
feedback system to keep the controlled variables above the target. It is applicable to flow control,
pressure control, temperature control, and so on. The following is the basic schematic block diagram
for output frequency regulation.
+
-
Reference-
feedback<P09.08?
P09.10
(lower limit value of PID
output)
P09.09
(upper limit value of PID
output)
0
1
P09.03
(PID output characteristics)
PID output
P17.00
P17.23
P09.08 (Limit of PID control deviation)
P09.02
(PID feedback source)
P09.00
(PID reference source)
P17.24
PID feedback
value
PID reference value
Set frequency
0
1
2
3
4
5
6
7
8
9
Keypad
AI1
PROFIBUS/CANopen
Modbus
Multi-step speed
HDIA
AI3
AI2
Ethernet
Reserved
0
1
2
3
4
5
6
7
AI1
PROFIBUS/CANopen
Modbus
HDIA
AI3
AI2
Ethernet
Y
N
PID stops
adjustment
PID digital setting
Keep current frequency
Terminal function 25
PID control pause
Valid
Invalid
Kp P09.04 (proportional gain)
Ti P09.05 (integral time)
Td P09.06 (differential time)
P09.01
PROFINET 10
Reserved
PROFINET
8
Introduction to the working principles and control methods for PID control:
Proportional control (Kp): When the feedback is different from the reference, the output will be
proportional to the difference. If such a difference is constant, the regulating variable will also be
constant. Proportional control can respond to feedback changes rapidly, however, it cannot eliminate
the difference by itself. A larger proportional gain indicates a faster regulating speed, but a too large
gain will result in oscillation. To solve this problem, set the integral time to a large value and the
differential time to 0, run the system only with proportional control, and then change the reference to
observe the difference (that is, static difference) between the feedback signal and reference. If the
static difference occurs in the direction of reference change (such as reference increase, where the
feedback is always less than the reference after system stabilizes), continue increasing the
proportional gain; otherwise, decrease the proportional gain. Repeat this process until the static
difference becomes small.
Integral time (Ti): When feedback is different from reference, the output regulating variable
accumulates continuously, if the difference persists, the regulating variable will increase continuously

 Loading...
Loading...