Commissioning
Operation with motors from other manufacturers
Effecting rotor position adjustment
6
138
EDBCSXA064 EN 3.2
6.12.4 Effecting rotor position adjustment
Note!
Resolver / absolute value encoder with Hiperface® interface
ƒ If the rotor zero phase is not known, the rotor position only has to be
adjusted once during commissioning.
ƒ For multi−turn absolute value encoders, the traversing range must be within
the display range of the encoder (0 ... 4095 revolutions) if the traversing
range is limited.
TTL incremental encoder / sin/cos encoder with zero track
ƒ If these encoder types are used for the operation of synchronous motors, the
rotor position must be adjusted every time the low−voltage supply is
switched on.
The rotor position must be adjusted if:
ƒ A motor from another manufacturer is connected to the controller.
ƒ Another encoder has been mounted subsequently.
ƒ A defective encoder has been replaced.
The rotor position can only be adjusted if:
ƒ The resolver is polarised correctly.
ƒ The current controller has been adjusted.
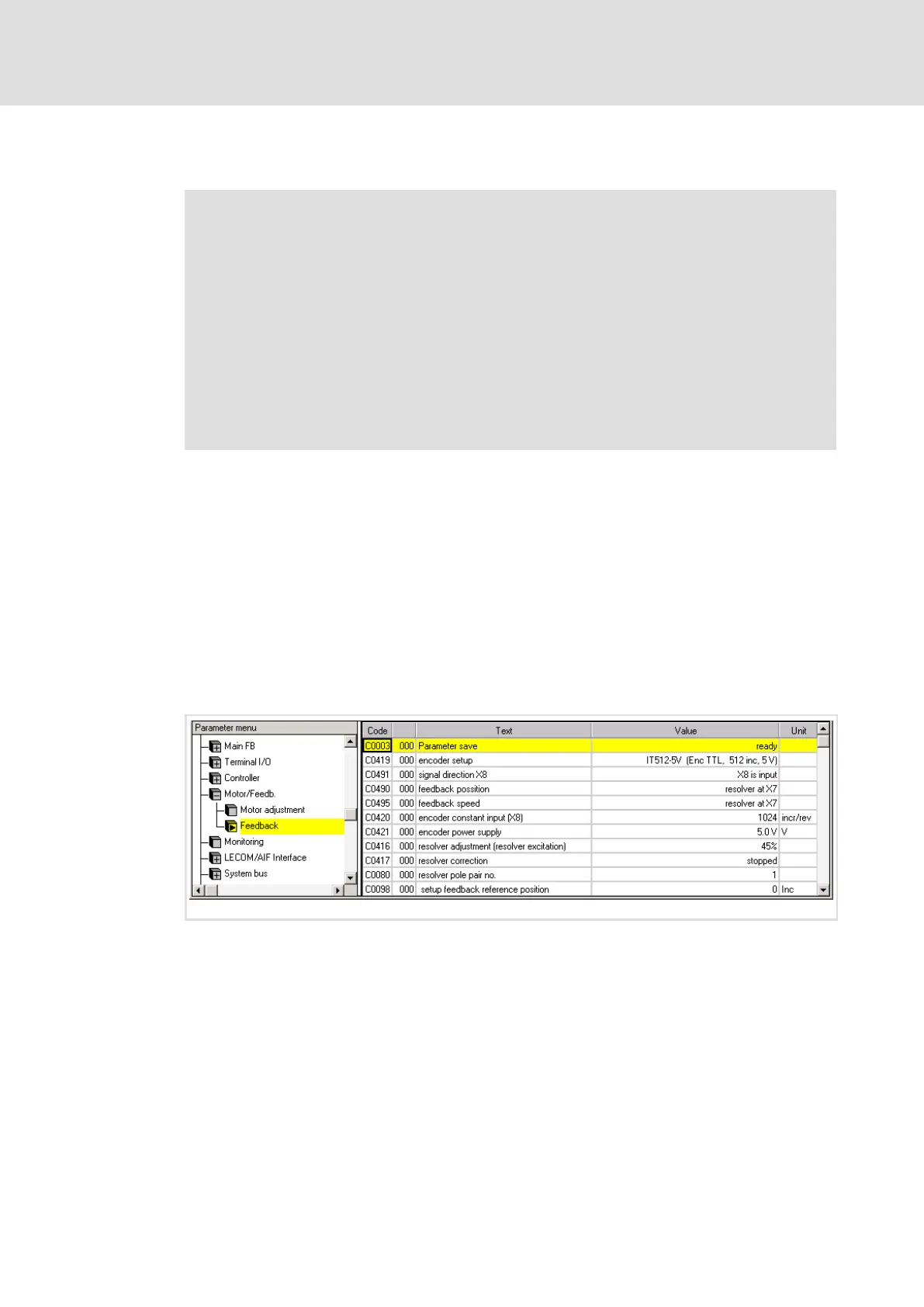
The GDC contains the parameters or codes to be set on the parameter menu under
Motor/Feedb. Rotor position adjustment:
Fig. 6−11 GDC view: Commissioning of the feedback system

 Loading...
Loading...







