System bus (CAN / CAN−AUX) configuration
Diagnostics codes
CAN bus status (C0359/C2459)
8
177
EDBCSXA064 EN 3.2
8.10 Diagnostics codes
The following diagnostic codes serves to follow the process of the CAN communication via
the interfaces X4 (CAN, C03xx) and X14 (CAN−AUX, C24xx):
ƒ C0359/C2459: Bus state
ƒ C0360/C2460: Telegram counter
ƒ C0361/C2461: Bus load
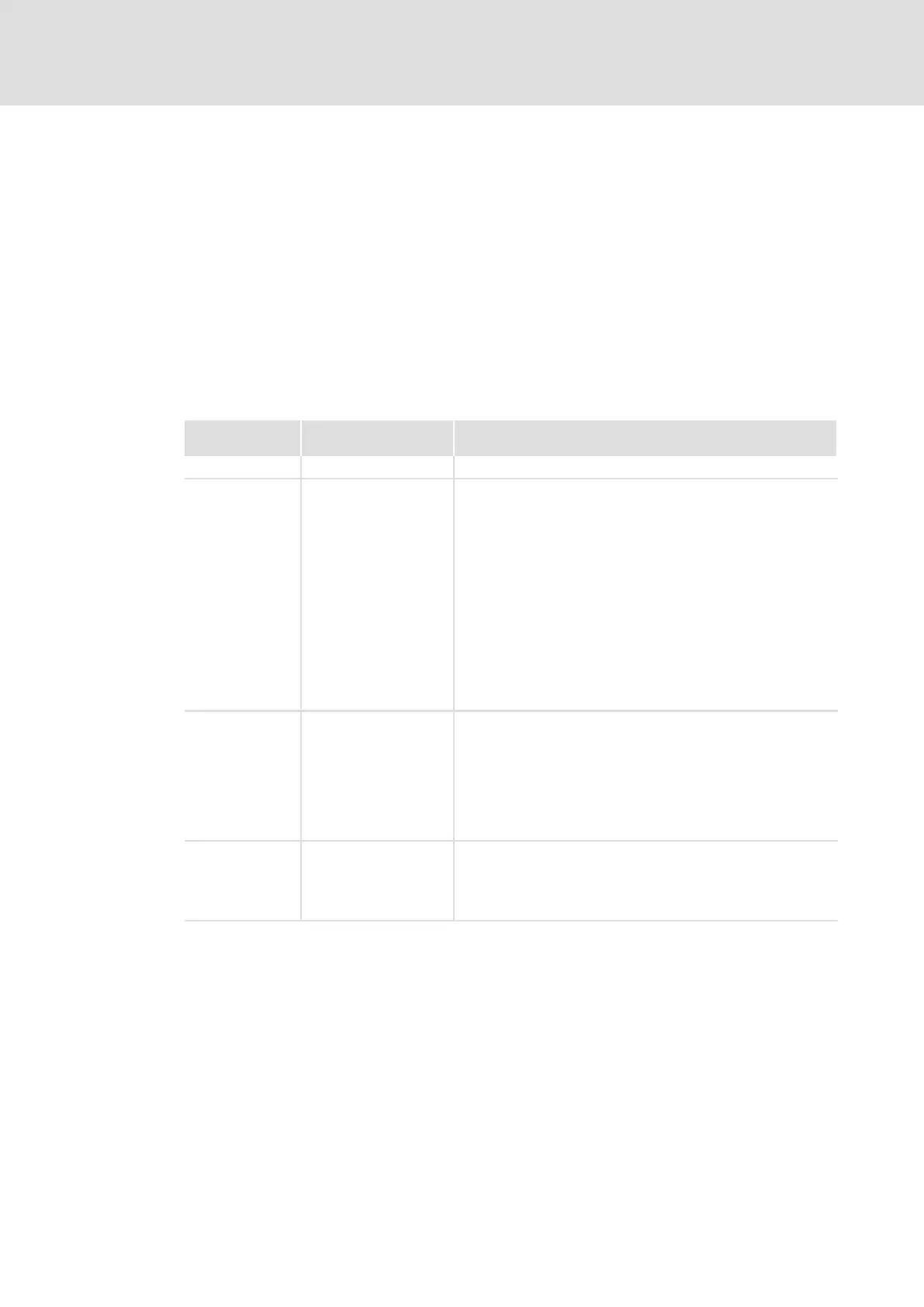
8.10.1 CAN bus status (C0359/C2459)
C0359/C2459 shows the current CAN operating state.
Value of
C0359/C2459
Operating state Description
0 Operational The bus system is fully operational.
1 Pre−operational Only parameters (codes) can be transferred via the bus system.
Data exchange between controllers is not possible. A change into
the state "operational" can be made via a special signal on the
CAN bus.
A status change from "Pre−operational" to "Operational" is
possible through:
l Master function of a higher−level host system
l If a master has been selected under C0352/C2452, the
operating status will be changed automatically for the entire
drive system after the set boot−up time (C0356/C2456) when
power is switched on.
l Reset node via C0358/C2458 ( 279)
l With a binary input signal "Reset node", which can be set
accordingly.
l Reset node via the connected hostsystem
2 Warning Faulty telegrams have been received. The controller is passive
(does not send any data). Possible causes:
l Missing bus termination
l Insufficient shielding
l Potential differences in the grounding of the control
electronics
l Bus load is too high
l Controller is not connected to the CAN bus
3 Bus off Too many faulty telegrams. The controller is disconnected from
the CAN bus. It can be reconnected by:
l TRIP−RESET
l Reset node ( 279)
l Mains reconnection

 Loading...
Loading...







