Appendix
PLC functionality
14
374
EDBCSXA064 EN 3.2
14 Appendix
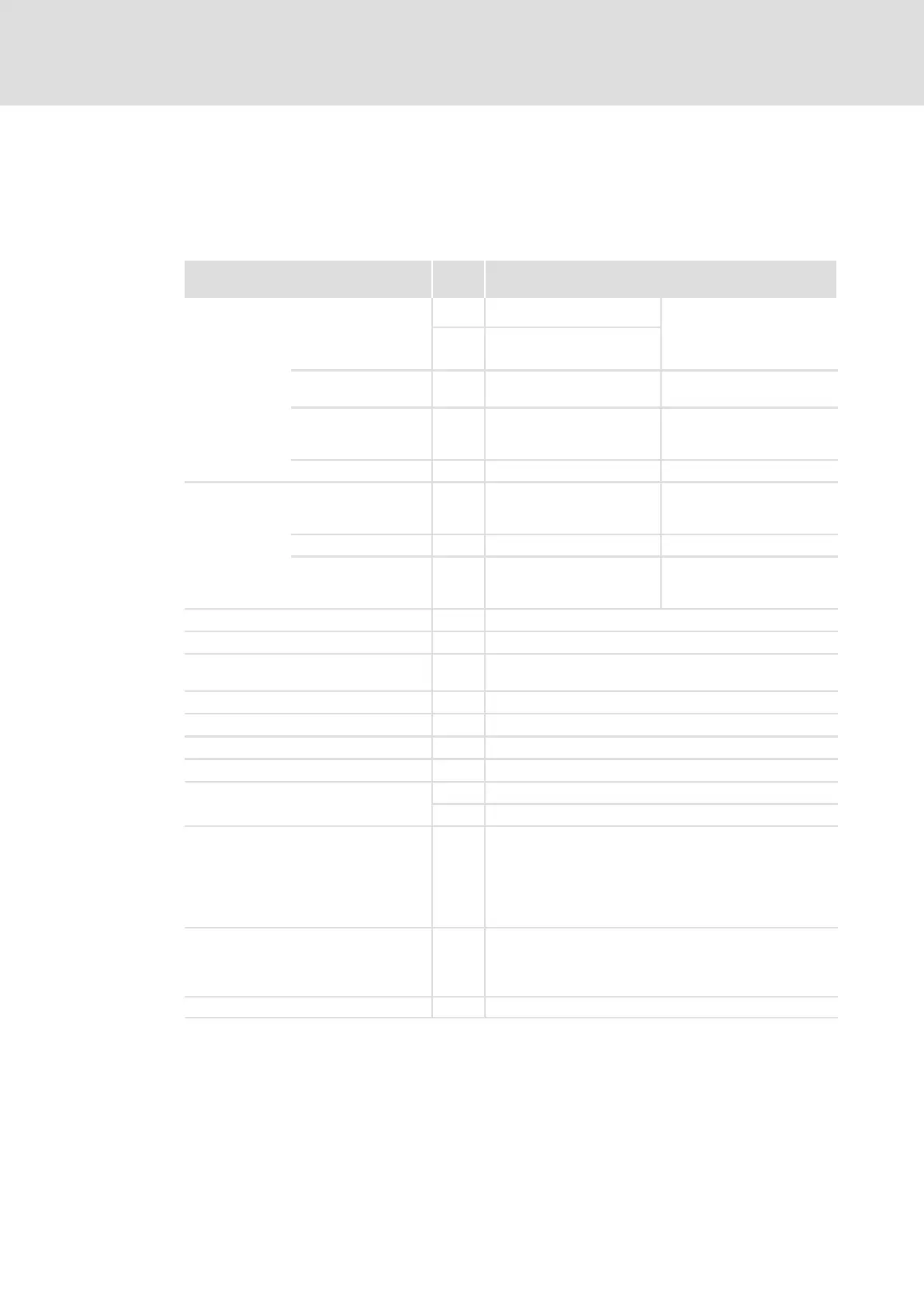
14.1 PLC functionality
Field Quan−
tity
Description
Inputs Digital
1
Input for controller enable
24 V DC
8 mA per input
1
response time 0.25 ms
4 Free inputs
(2 interrupt−capable
1
)
Analog 1 Free input
(11 bits + sign)
−10 ... +10 V
−20 ... +20 mA/+4 ... +20 mA
"Safe torque off"
(former "safe
standstill")
2 X6/SI1 for controller inhibit
X6/SI2 for pulse inhibit
24 V DC / 8 mA per input
Digital frequency 1 Input 0 ... 500 kHz
Outputs
Digital 1 Free output 24 V DC / 0.7 A
max. 1.4 A
(short−circuit−proof)
Digital frequency 1 Output 0 ... 500 kHz
"Safe torque off"
(former "safe
standstill")
1 S6/SO for feedback 24 V DC / 0.7 A
max. 1.4 A
(short−circuit−proof)
Feedback system Resolver, incremental or sin/cos encoder
Operation set According to IEC61131−3
Counter/times According to IEC61131−3, depending on the data memory
available
Fast counter 1 0 ... 500 kHz
Flags 512 Flag words
Memory See chapter 14.3 ( 376)
Processing time (1−bit operation) 0.7 ms
Task types
8 Time or event−controlled tasks (1 ms ... 16 s)
1 Cyclic task
Functions l PID control functions
l Electrical shaft
l Positioning function
l Mains failure control
l Brake control
l Yield point arithmetic
Programming software Drive PLC Developer Studio
l Programming languages according to IEC61131−3 (IL, LD,
FBD, ST, SFC) as well as CFC editor
l Monitoring, visualisation, simulation and debugging
Technology functions Software packages (cam, positioner, winder)

 Loading...
Loading...







