7
Controller system settings
7-12
10.3 Parameter list
■
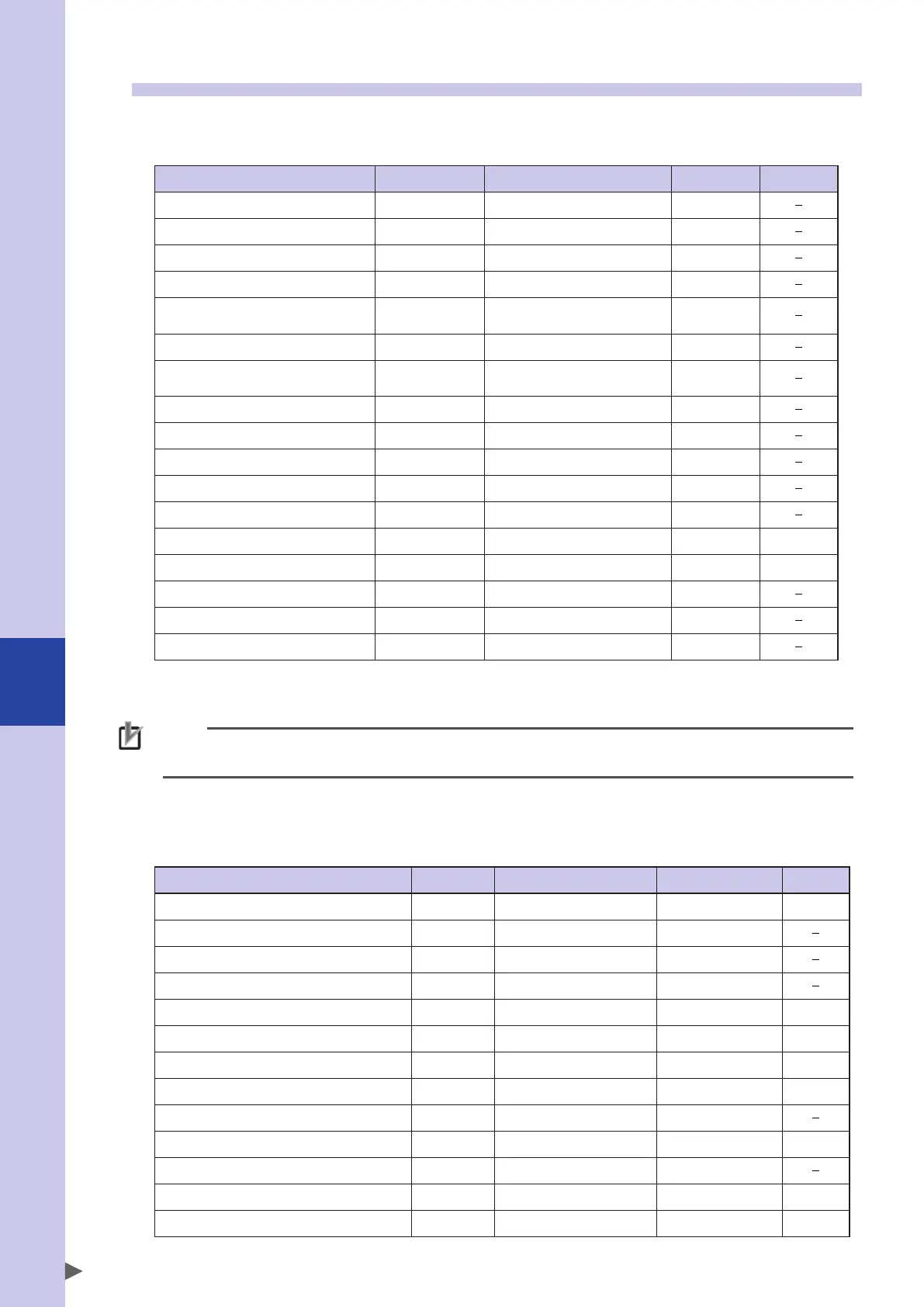
Controller parameters
For details about parameters, refer to "10.4 Controller parameters" in this Chapter.
Name Identifier Setting range Initial value Unit
Incremental Mode control INCMOD 0: INVALID, 1: VALID 0
MOVEI/DRIVEI start pos. MOVIMD 0: KEEP, 1: RESET 0
MOVET start pos. MOVTMD 0: KEEP, 1: RESET 0
Servo on when power on SRVOON 0: INVALID, 1: VALID 0
Sequence flag
*1
SEQFLG
0: INVALID, 1: VALID
3: VALID & EMG-Reset
0
Safe mode flag
*1
SAFEMODE -2147483648 to 2147483647 -1
Permission to start program in origin
non-completion
RUNINOIC 0: INVALID, 1: VALID 0
Permission to reset at controller boot RSTATBOT 0: INVALID, 1: VALID 0
Permission to reset at program start RSTATRUN 0: INVALID, 1: VALID 0
Current program no. CRNTPG 0 to 100 0
Main program no. MAINPG 0 to 100 0
INPUT/PRINT using channel STDPRN 1: PB, 2: CMU, 3: ETH 1
Emergency time
*1*2
EMGTIM 0 to 2000 1000 ms
Emergency time 2
*1*2
EMGTIM2 0 to 2000 300 ms
Debug start mode DBGSTAMD 0: LOAD, 1: START 0
Break point stop mode BRKSTPMD 0: HOLD, 1: HALDALL 1
Shift on area check out SFTONACO 0: INVALID, 1: VALID 1
*1 Contact your distributor for changing these parameters as editing them may influence the robot control.
*2 New setting values will be valid after turning off and on the power.
NOTE
This manual describes the controller parameters shown above.
Others are normally write-protected. When such parameters need to be changed, contact your distributor.
■
Robot parameters
For details about parameters, refer to "10.5 Robot parameters" in this Chapter.
Name Identifier Setting range Initial value Unit
Tip weight WEIGHT 0 to 500
Depends on the model.
kg
Origin sequence ORGORD 0 to 654321 312456
R axis orientation RORIEN 0: KEEP, 1: FREE 0
Arm type at reset ARMTYP
0: NONE, 1: RIGHT, 2: LEFT
0
MOVE L coef. CPACRAT 1 to 100 100 %
R axis inertia SCRINR 0 to 32767 0 10
-4
kgm
2
MOVE L max speed
*1
CPVMAX 1 to 32767 750 mm/s
MOVE L accel.
*1
CPACCL 1 to 32767 500 mm/s
2
MOVE L comp. curve
*1
CPCMPCRV 0 to 255 0
MOVE L comp. velocity
*1
CPCMPVL 1 to 32767 500 mm/s
Zone control
*1
ZONCTRL 0: INVALID, 1: VALID 0
XY axis accel. rate
*1
SCRACC 1 to 500 100 %
XY axis accel. velocity
*1
SCRVEL 1 to 500 100 %

 Loading...
Loading...






