9
Specifications
9-1
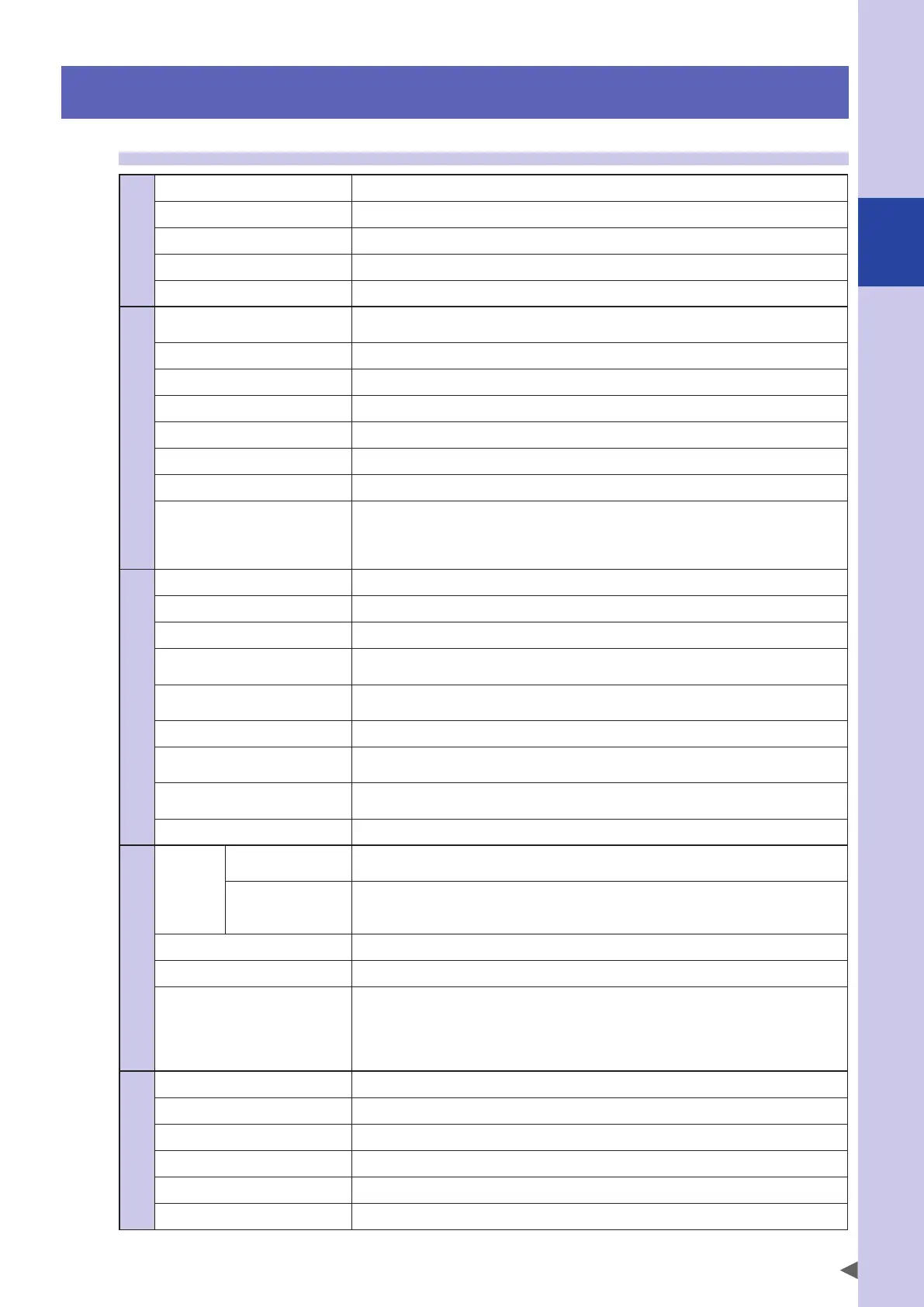
1. Controller
1.1 Specifications
Basic specifications
Connected motor capacity 1600 W or less (in total for 4 axes)
Power capacity 2500 VA
Dimensions W355 × H195 × D130 (main unit)
Weight 6.2kg (main unit)
Power supply voltage Single phase 200 to 230 V AC ±10%, 50/60 Hz
Axis control
Number of controllable axes
4 axes maximum (simultaneous control: 6 axes)
Up to 16 axes (4 robots) can be expanded through the controller link.
Drive method AC full digital servo
Position detection method Resolver, Magnetic linear scale
Control method PTP motion (Point to Point), ARCH motion, linear interpolation, circular interpolation
Coordinate systems Joint coordinates, Cartesian coordinates
Position display units Pulses, millimeters (1/1000 increments), degrees (1/1000 increments)
Speed setting 0.01-100%, (setting for less than 1% possible with the commands execution)
Acceleration/deceleration setting
Optimization based on robot model and tip weight parameter
Setting with accel coefficient and decel. rate parameters (1% steps)
*Can be changed by programming.
Zone control (Optimum acceleration setting matching SCARA robot arm position)
Programming
Program language PSEUDO-BASIC (conforming to JIS B8439 (SLIM language))
Multitask 16 tasks maximum
Sequence program 1 program
Memory size
2.1 MB (Total of program and point data) (Available size for program when the maximum of
point is used: 300 KB)
Program
100 programs (maximum number of programs)
9999 lines (maximum lines per program)
Point 30000 points (maximum number of points)
Point teaching
MDI (coordinate value input), direct teaching, teaching playback, offline teaching (data
input from external device)
System backup
(Internal memory backup)
Lithium battery (service life about 4 years at 0 to 40°C)
Internal flash memory 512 KB
External I/O
SAFETY
Input
Emergency stop input, 2 systems
AUTO mode input, 2 systems (valid only for the CE specifications)
Output
Emergency stop contact output, 2 systems
Enable contact output, 2 systems (valid only when using the PBEX)
Motor power ready output, 2 systems
Break output Transistor output (PNP open-collector)
Origin sensor input Connectable to 24 V DC NC contact (normally closed) sensor
External communications
RS-232C : 1 CH (D-SUB 9-pin female connector)
Ethernet : 1CH (IEEE802.3u/IEEE802.3 compliance)
100Mbps/10Mbps (100BASE-TX/10BASE-T)
Applicable to Auto Negotiation
RS-422 : 1CH (dedicated to the programming box)
General specifications
Operating temperature 0 to 40 °C
Storage temperature -10 to 65 °C
Operating humidity 35 to 85% RH (no condensation)
Noise immunity Conforms to IEC61000-4-4 Level 3
Protective structure IP20
Protection class I

 Loading...
Loading...






