4
I/O interface
4-14
1.11.3 Return-to-origin
■
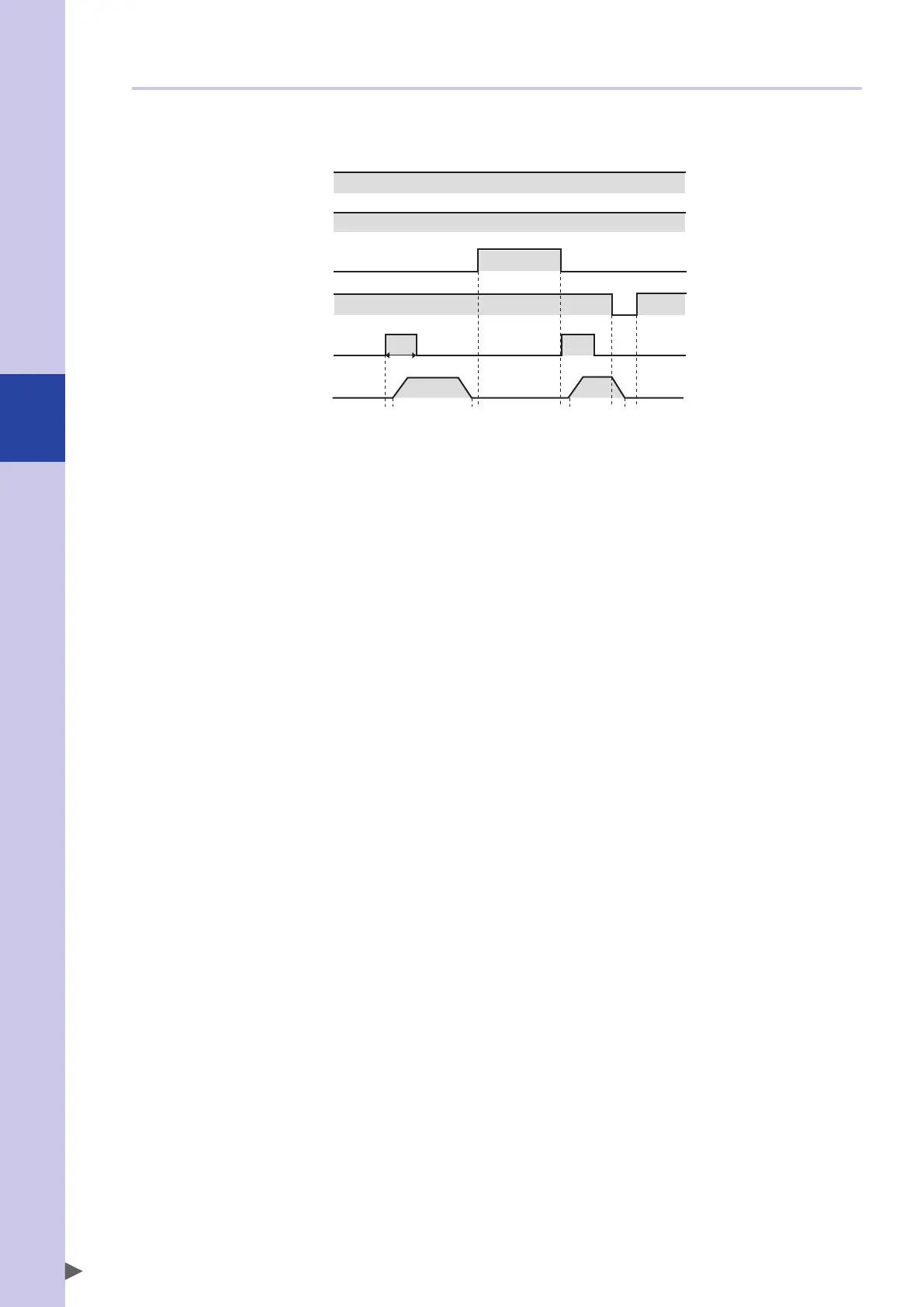
Return-to-origin
Conditions: Servo ON, AUTO mode
Move
Stop
CPU_OK
DO01a
Servo ON output
DO02a
Return-to-origin complete
DO11
Stop
DI06
Return-to-origin
DI14/DI17
Robot axis status
a) b) c)d) e) f) g) h) i)
100 ms or more
on
off
on
off
on
off
on
off
on
off
Return-to-origin
a) Return-to-origin input turns on. (pulse width: 100 ms or more)
b) Robot axis starts moving to origin position.
c) Robot axis reaches origin position and stops moving.
d) Return-to-origin complete output turns on.
Stop during return-to-origin
e) Return-to-origin input turns on (pulse width: 100 ms or more) and return-to-origin complete output turns off.
f) Robot axis starts moving to origin position.
g) Stop input turns off.
h) On-going robot axis movement stops.
i) Stop input turns on.
* When the return-to-origin complete output is on, return-to-origin does not have to be performed.
* Return-to-origin complete output keeps on until performing return-to-origin is required.
* Return-to-origin cannot be executed unless the robot is in the servo on status.
* When the return-to-origin input is on, the return-to-origin complete output is off.
* When turning on the controller with the incremental type axes, the robot enters the return-to-origin incomplete status.
Therefore, the return-to-origin complete output turns off.
* When the robot consists of only the absolute type axes, it starts up in the return-to-origin complete output on status
if the position information alarm does not occur at turning on the controller.
*
When the "DI17 mode" parameter is set to "ABS/ORG", return-to-origin can also be performed with DI17. For description
of DI14 and DI17, refer to "1.9 Dedicated input signal description" in this Chapter.