7
Controller system settings
7-15
10.4 Controller parameters
■
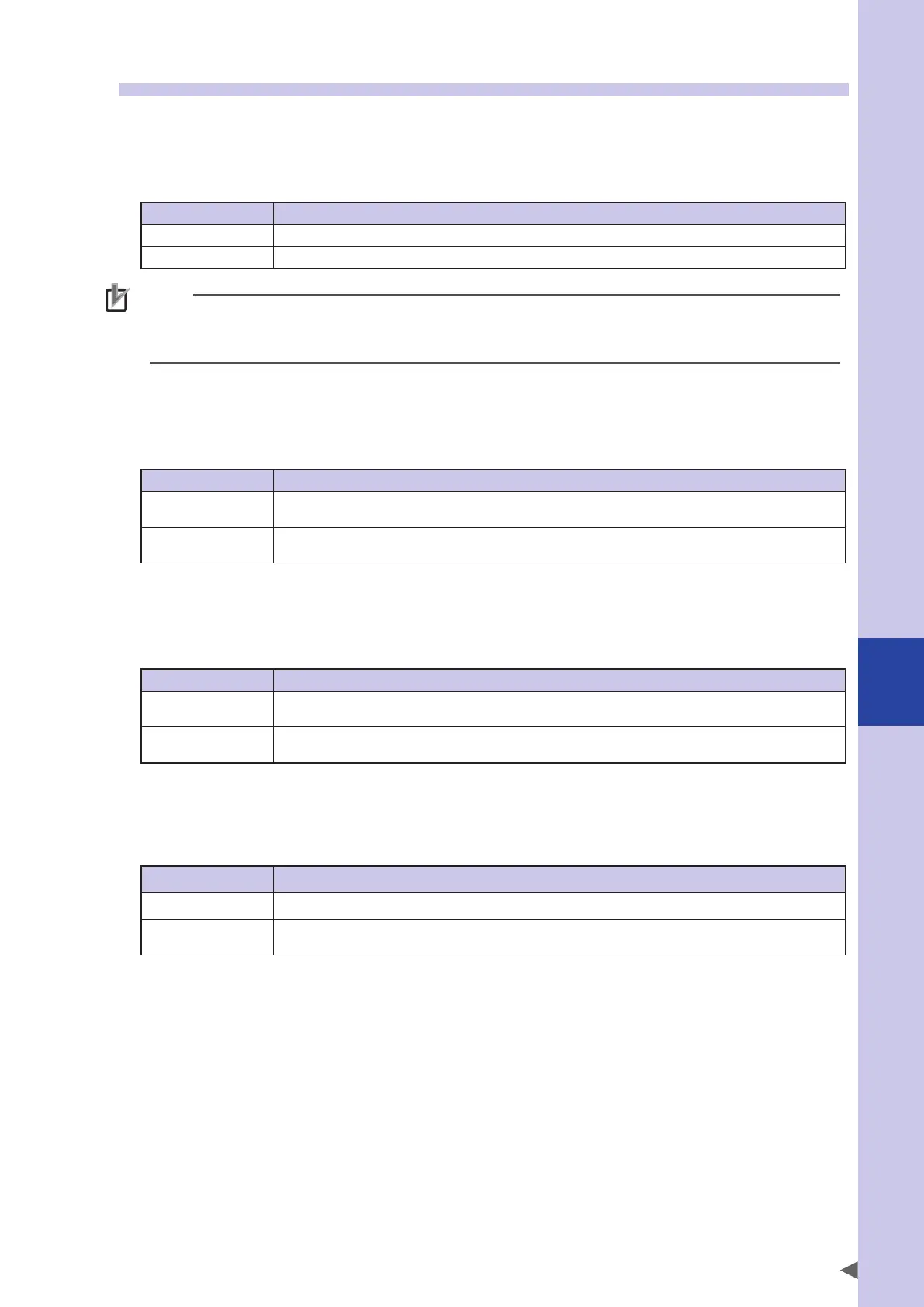
Incremental mode control
‹
INCMOD
›
This parameter sets whether or not the robot is always put in the return-to-origin incomplete status when starting up this
controller. Set "0: INVALID" in the case that there are axes whose return-to-origin method are set to "Mark". When this
parameter is initialized, "0: INVALID" is set.
Setting Meaning
0: INVALID Holds the origin position information on absolute type axes even when the power is shut down.
1: VALID Puts all axes in the return-to-origin incomplete status when turning on the power.
NOTE
• When this parameter is set to "VALID", all axes are always put in the return-to-origin incomplete status when
turning on the controller.
• When using the absolute type axes without installing the absolute battery, set this parameter to "VALID".
■
MOVEI/DRIVEI start pos.
‹
MOVIMD
›
This parameter sets the operation when executing the relative motion command again after it has been stopped by the
interlock or emergency stop. When this parameter is initialized, "0: KEEP" is set.
Setting Meaning
0: KEEP
The previous motion continues. The target position before executing again does not change. When
executing return-to-origin or absolute reset, the target position after the relative motion stop is reset.
1: RESET
The relative motion is newly performed from the current position. The target position before executing
again will change.
■
MOVET start pos.
‹
MOVTMD
›
This parameter sets the operation when executing the MOVET command again after it has been stopped by the interlock
or emergency stop. When this parameter is initialized, "0: KEEP" is set.
Setting Meaning
0: KEEP
The previous motion continues. The target position before executing again does not change. When
executing return-to-origin or absolute reset, the target position after the relative motion stop is reset.
1: RESET
The relative motion is newly performed from the current position. The target position before executing
again will change.
■
Servo on when power on
‹
SRVOON
›
This parameter sets whether the controller starts in the servo on status or servo off status when starting up the controller.
When this parameter is initialized, "0: INVALID" is set.
Setting Meaning
0: INVALID The controller always starts in the servo on status.
1: VALID
The controller starts in the servo on status. However, when the control authority is not released or the
serial I/O setting is enabled, the controller starts in the servo on status.

 Loading...
Loading...






