6.1 Brief introduction
Users can optimize the response of motor by adjusting servo gains. Servo gains are set by several
parameters (position loop gain, velocity loop gain, filter, vibration suppression and feedforward
compensation). Gain-related parameters can affect the performance of each other, so please consider the
balance among their settings. The default settings of gain-related parameters are set to have relatively
stable servo gains. Use tuning functions provided in E1 series servo drive to improve response
performance according to your mechanism and operating condition.
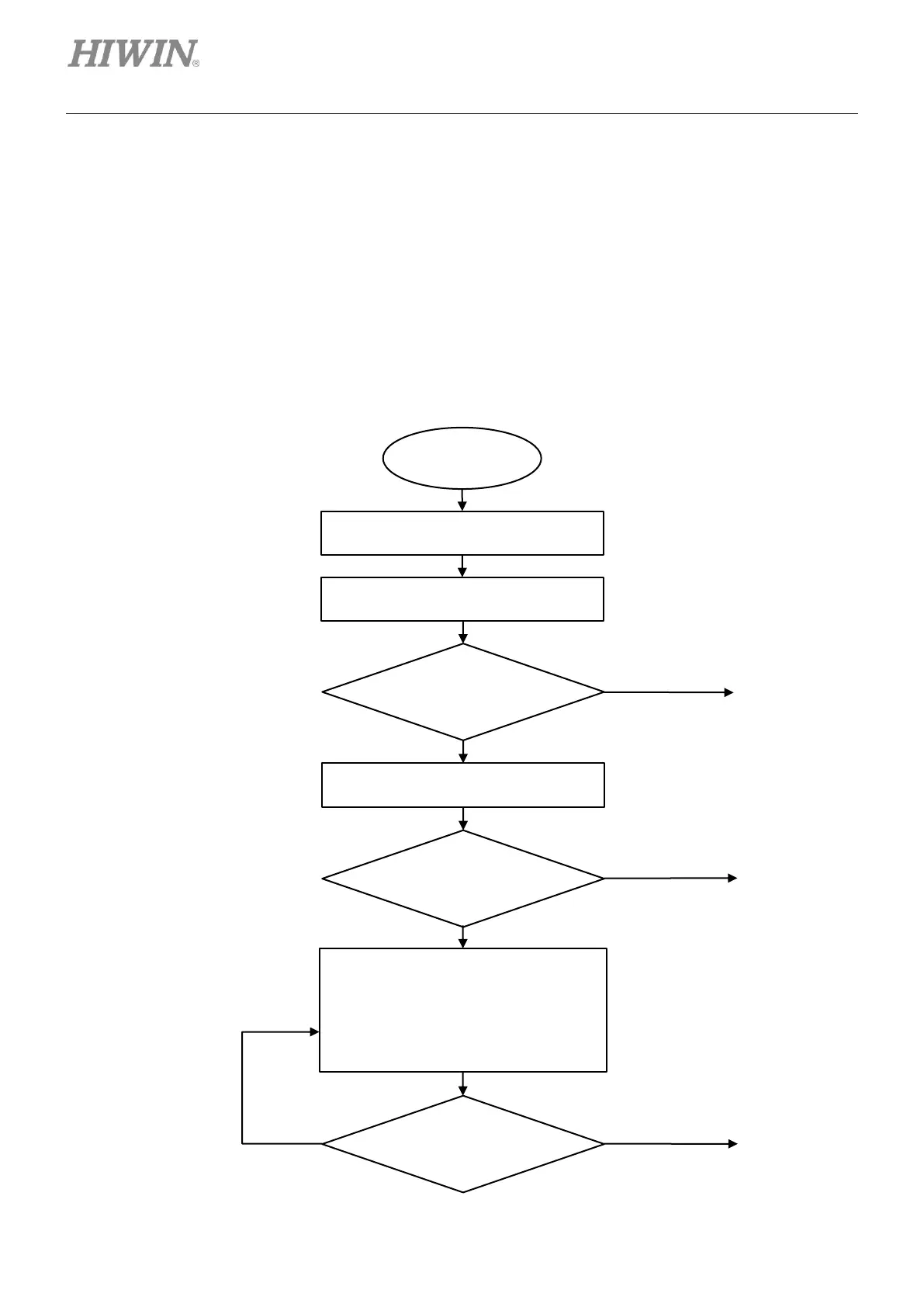
The flow chart for tuning procedure is as below.
Figure 6.1.1
Yes

 Loading...
Loading...


