E1 Series Servo Drive Thunder Software Operation Manual Advanced Functions
HIWIN MIKROSYSTEM CORP. 9-37
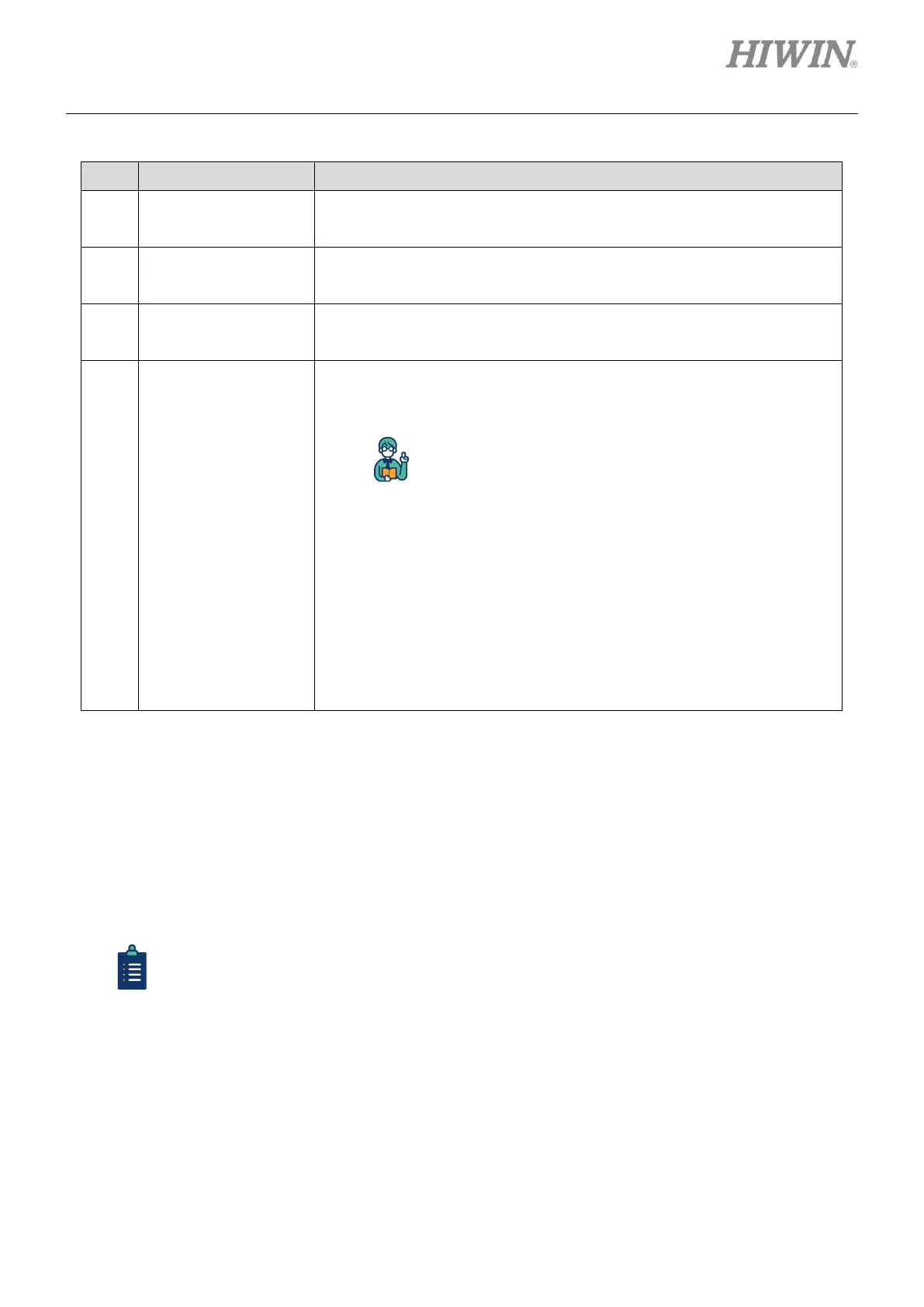
Besides getting gantry communication status, users can clear gantry-
related alarm here if it occurs.
Status field for linear
axis
Users can get linear axis’ feedback position and activate/deactivate gantry
function here.
Status field for yaw
axis
Users can get yaw axis’ feedback position and know whether yaw axis is
ready here.
After keying in the target positions in (2) and (3), click Test Run to make
the motor move with the velocity set by Pt585 or Pt533.
1. If both master axis and slave axis are linear
motors, linear axis’ moving velocity is the
setting value of Pt585 of master axis, and yaw
axis’ rotating velocity is the setting value of
Pt585 of slave axis.
2. If both master axis and slave axis are AC servo
motors, linear axis’ moving velocity is the
setting value of Pt533 of master axis, and yaw
axis’ rotating velocity is the setting value of
Pt533 of slave axis.
9.7.2 Preparation
1. Select the model supporting gantry function (ED1□-□G-□□□□-□□) and connect two servo drives via
CN8 with the communication cable.
2. Initialize the two axes to the level that both of them can be normally operated.
Refer to “E1 Series Servo Drive Gantry Control System User Manual” for the detailed tuning
methods and contents.

 Loading...
Loading...


