LC02 Speed Gain Optimization
If the inertia learn procedure has taken place, then the Speed Gain Optimization provides
e
proportional and integral gain and adjustment of the optimization will scale each
accordingly.
Learn system inertia.
The system inertia must be learned for the Speed Gain Optimization to
be implemented. Optimization will lower the KI gain. For reference, a
value of 10 in LC02 normalizes the Kp value to 3000. So, if LC02 = 10,
the Kp gain goes to 3,000 and the KI gain drops to what is calculated;
this is the best starting point. Refer to the Inertia Learn section for
learning the system inertia.
In most cases, the default settings for the Proportional and Integral speed control
gains should provide a very good starting point for proper operation and ride
quality.
Error, learn system first
The proportional gain maintains general control and stability over the entire speed
range. The proportional gain is split into three values: One for acceleration and
constant speed, (LC03), one for deceleration and leveling (LC04) and one for pre-
torque (LC05). Additionally, the value can be made speed dependent to
automatically increase/reduce (LC25) with speed. Adjustments are also available
for resonant frequencies (LC20-24).
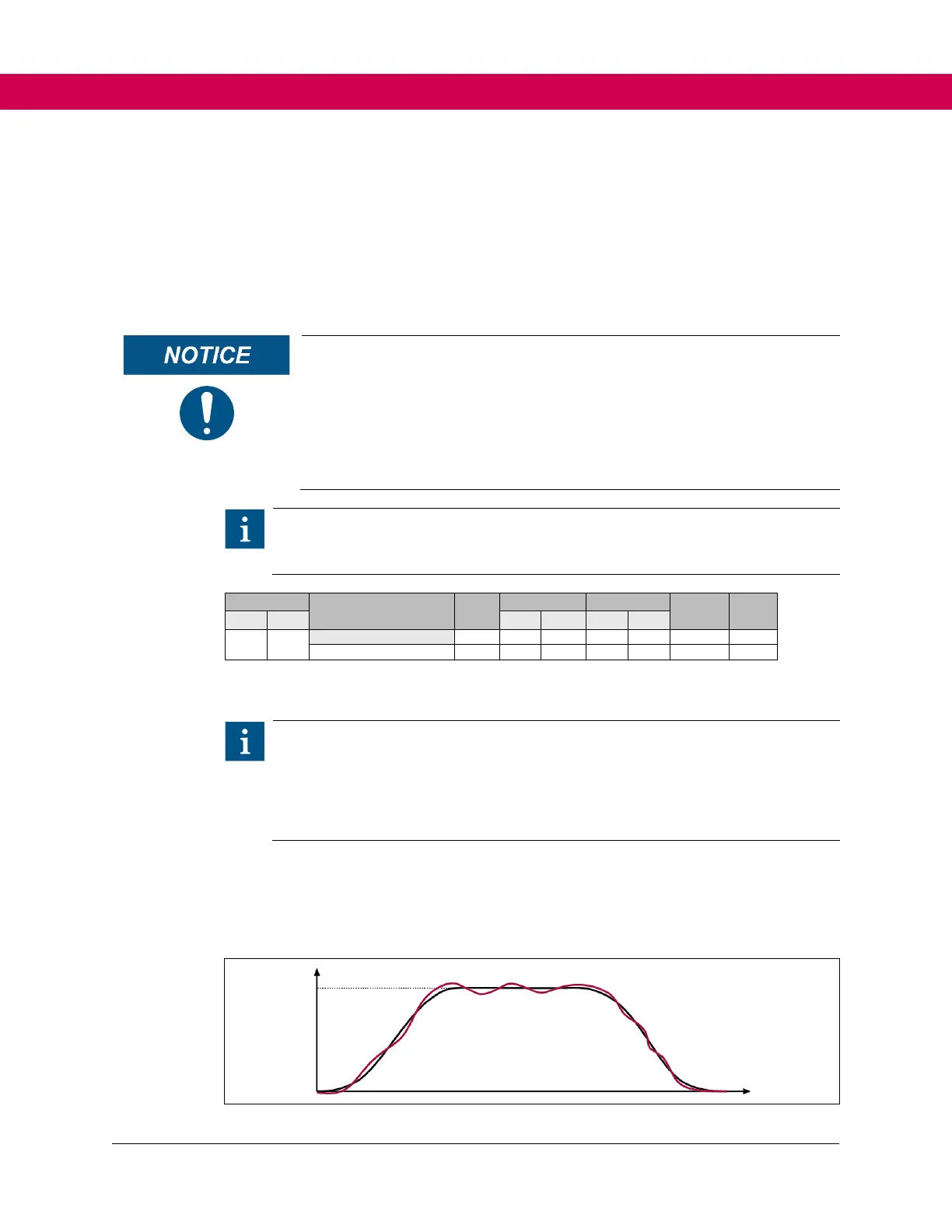
Lower values may result in loose control and overshoot of the command speed as high
speed is reached. High values can cause high frequency oscillation resulting in vibration
or a buzzing sound in the motor. If tighter control is necessary, the corresponding
proportional gain can be raised accordingly.
Proportional Gain Too Low - Poor Control
 Loading...
Loading...



