5.4 Process Data Overview
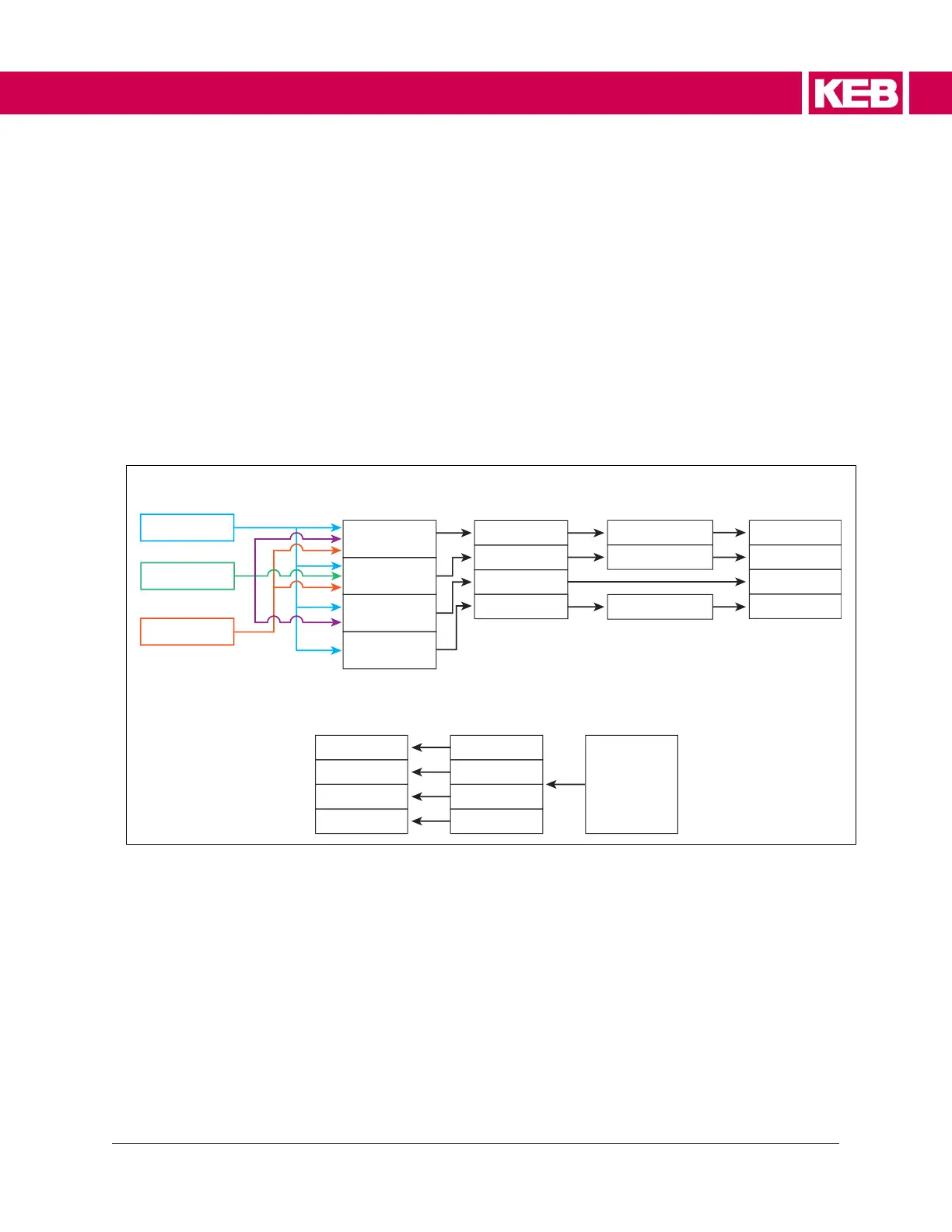
The bus communication in the F6 elevator drive consists of four 32-bit containers for
incoming data (PDI - Process Data In) and four 32-bit containers for outgoing data (PDO
- Process Data Out).
Depending on the DIN66019II service used, the string of PDI data from the telegram will
be deposited into two or more of the containers. The containers are then mapped (FB17-
20) to a defined function (e.g., Control Word, Speed, Pre-torque, Absolute Target
Position) with the function structure also defined. Depending on the function, the raw PDI
data (FB34-37) may be scaled or masked (FB05-07) before being processed by the drive
(FB01-04).
The PDO data originates from the DG parameters. This data maps (FB13-16) to the four
PDO containers and then depending on the service, taken from the container, and placed
in the response telegram (FB30-33).
5.4.1 PDI - Process Data Inputs
For the PDI, there are four fixed functions established, each with a corresponding
structure definition:
• Control Word
• Speed
• Pre-torque
• Absolute Target Position
 Loading...
Loading...



