ACS550-02/U2 User’s Manual 163
Parameters
Group 23: SPEED CONTROL
This group defines variables used for speed control operation.
Code Description
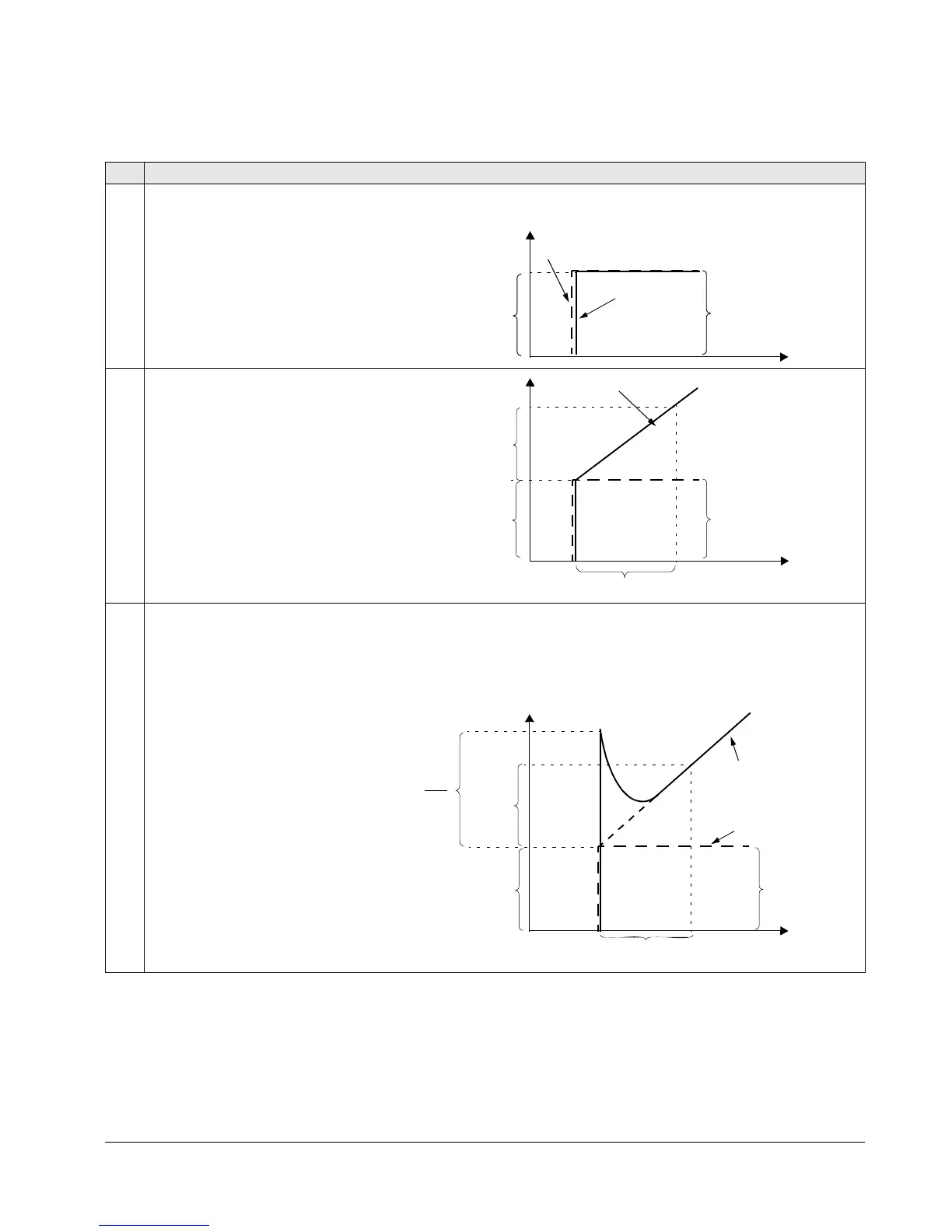
2301 PROP GAIN
Sets the relative gain for the speed controller.
• Larger values may cause speed oscillation.
• The figure shows the speed controller output
after an error step (error remains constant).
Note: You can use parameter 2305
AUTOTUNE
RUN to automatically set the proportional gain.
2302 INTEGRATION TIME
Sets the integration time for the speed
controller.
• The integration time defines the rate at which
the controller output changes for a constant
error value.
• Shorter integration times correct continuous
errors faster.
• Control becomes unstable if the integration
time is too short.
• The figure shows the speed controller output
after an error step (error remains constant).
Note: You can use parameter 2305
AUTOTUNE
RUN to automatically set the integration time.
2303 DERIVATION TIME
Sets the derivation time for the speed controller.
• Derivative action makes the control more responsive to error value changes.
• The longer the derivation time, the more the speed controller output is boosted during the change.
• If the derivation time is set to zero, the controller works as a PI controller, otherwise as a PID controller.
The figure below shows the speed controller output after an error step when the error remains constant.
Gain = K
p
= 1
T
I
= Integration time = 0
T
D
= Derivation time = 0
Error value
Controller output
%
e = Error value
t

 Loading...
Loading...









