232 ACS550-02/U2 User’s Manual
Embedded fieldbus
Mapping summary
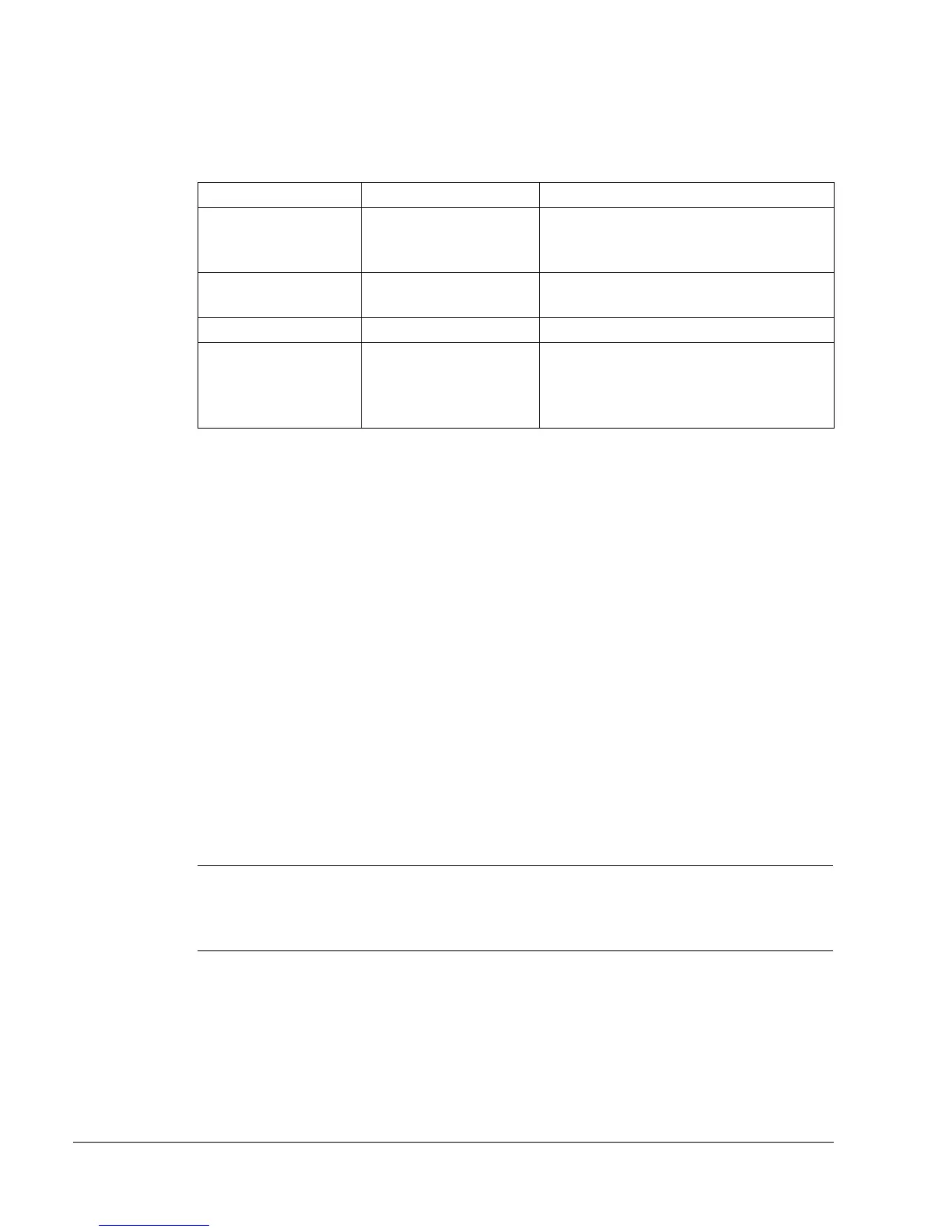
The following table summarizes the mapping between the ACS550 (parameters and
I/0) and Modbus reference space. For details, see Modbus addressing below.
Communication profiles
When communicating by Modbus, the ACS550 supports multiple profiles for control
and status information. Parameter 5305
EFB CTRL PROFILE selects the profile used.
•
ABB DRV LIM – The primary (and default) profile is the ABB DRV LIM profile. This
implementation of the ABB Drives profile standardizes the control interface with
ACS400 drives. The ABB Drives profile is based on the PROFIBUS interface. It is
discussed in detail in the following sections.
•
DCU PROFILE – The DCU PROFILE profile extends the control and status interface to
32 bits. It is the internal interface between the main drive application and the
embedded fieldbus environment.
•
ABB DRV FULL – ABB DRV FULL is the implementation of the ABB Drives profile that
standardizes the control interface with ACS600 and ACS800 drives. This
implementation supports two control word bits not supported by the
ABB DRV LIM
implementation.
Modbus addressing
With Modbus, each function code implies access to a specific Modbus reference set.
Thus, the leading digit is not included in the address field of a Modbus message.
Note: The ACS550 supports the zero-based addressing of the Modbus
specification. Holding register 40002 is addressed as 0001 in a Modbus message.
Similarly, coil 33 is addressed as 0032 in a Modbus message.
Refer again to the Mapping summary above. The following sections describe, in
detail, the mapping to each Modbus reference set.
0xxxx Mapping – Modbus coils. The drive maps the following information to the
0xxxx Modbus set called Modbus Coils:
• bit-wise map of the
CONTROL WORD (selected using parameter 5305 EFB CTRL
PROFILE). The first 32 coils are reserved for this purpose.
ACS550 Modbus reference Supported function codes
• Control Bits
• Relay Outputs
Coils(0xxxx) • 01 – Read Coil Status
• 05 – Force Single Coil
• 15 – Force Multiple Coils
• Status Bits
• Discrete Inputs
Discrete Inputs(1xxxx) • 02 – Read Input Status
• Analog Inputs Input Registers(3xxxxx) • 04 – Read Input Registers
• Parameters
• Control/Status Words
• References
Holding Registers(4xxxx) • 03 – Read 4X Registers
• 06 – Preset Single 4X Register
• 16 – Preset Multiple 4X Registers
• 23 – Read/Write 4X Registers

 Loading...
Loading...









