4 Repair
4.3.6. Replacement of complete arm system
2613HAC023082-001 Revision: E
© Copyright 2004-2008 ABB. All rights reserved.
4.3.6. Replacement of complete arm system
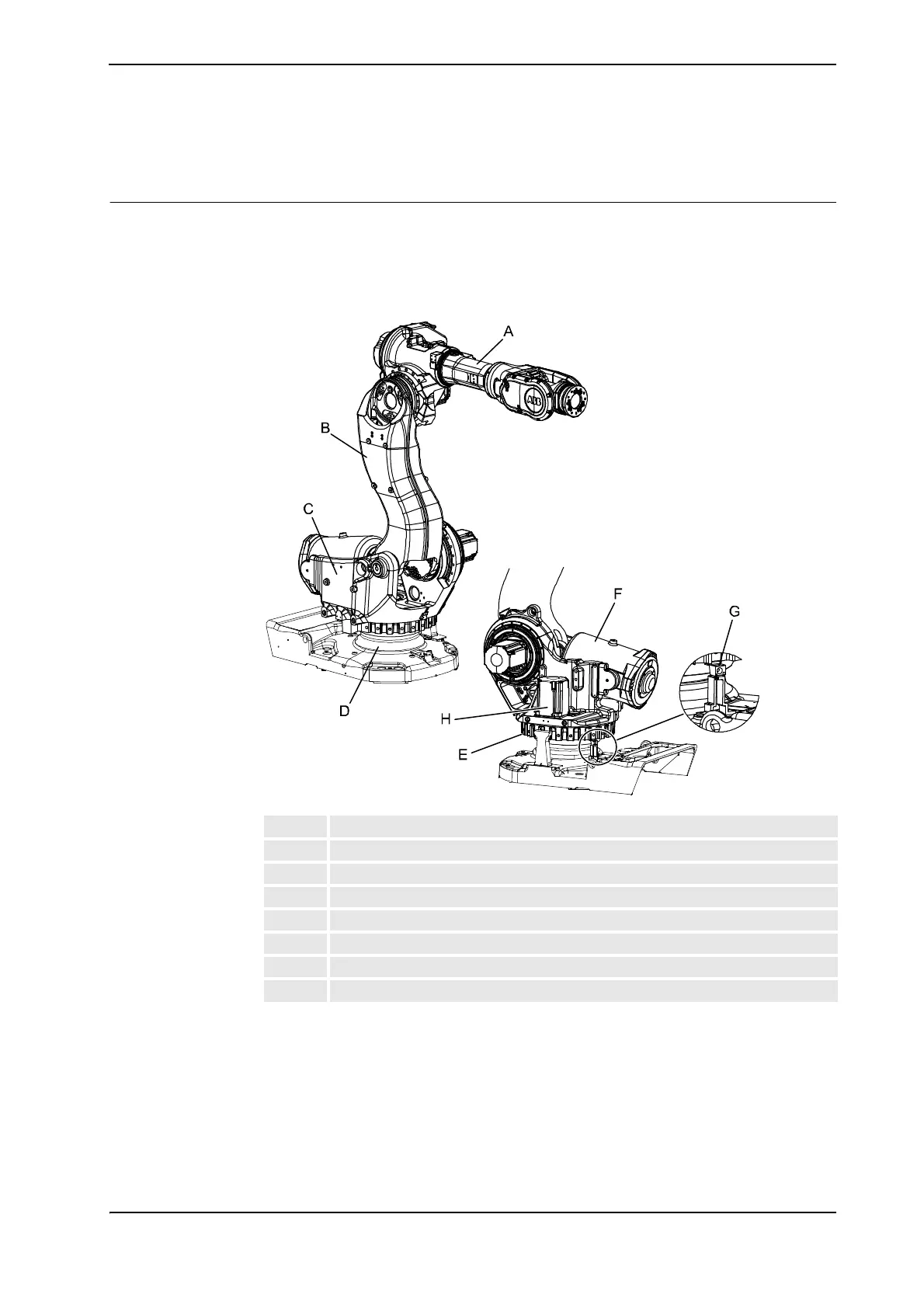
Location of arm system
The complete arm system is defined as the complete robot except for the base and gearbox
axis 1. This is shown in the figure below.
A more detailed view of the component and its position may be found in chapter Exploded
views on page 477 in part 2 of the Product manual.
xx0200000224
A Upper arm
B Lower arm
C Frame
D Gearbox, axis 1
E Base attachment screws
F Balancing device
G Block for calibration
H Motor axis 1
Continues on next page

 Loading...
Loading...






